Материал: 2426
(ДВС), зависящей только от минимального времени перемещения T груза и звеньев ГПК из начального положения в конечное,
AT=T∙kT, |
(4.151) |
здесь kT – заданный эмпирический коэффициент пропорциональности. Фиксированная составляющая AT соответствует расходу топлива
ДВС базовой машины крана при некоторых заданных для рабочего режима оборотах nраб в течение времени T при отсутствии дополнительных нагрузок, создаваемых силами и моментами сил трения и инерции звеньев и груза, т.е. AT – расход топлива ДВС при оборотах nраб в отсутствие перемещений рабочих органов. Минимальное время перемещений T определяется по методике раздела 4.6.
В свою очередь, удельные расходы топлива G7 … G10, для которых были получены регрессионные зависимости, зависящие от текущих значений параметров технологического процесса q8, q9, mГР и направления приращения управляемых координат, позволяют при перемещении груза ГПК по произвольной траектории в пространстве путем численного либо аналитического (при наличии аналитических зависимостей изменения управляемых координат q7…q10) интегрирования получить абсолютные значения расходов топлива по отдельным управляемым координатам A7 … A10 и расхода топлива для всей заданной траектории Ae и оценить таким образом энергозатраты:
Ae = A7+A8+A9+A10+AT=
|
q7кон |
(q8, q9, mГР )dq7 |
|
q8кон |
(q8, q9, mГР )dq8 + |
|
|
||
= |
ò G7 |
+ |
ò G8 |
|
|
||||
|
q7нач |
|
|
q8нач |
|
|
|
|
|
|
q9кон |
(q8, q9 , mГР )dq9 |
|
q10кон |
|
(mГР )dq10 |
+T × kT |
|
(4.152) |
+ |
òG9 |
+ |
ò G10 |
, |
|||||
|
q9нач |
|
|
q10нач |
|
|
|
|
|
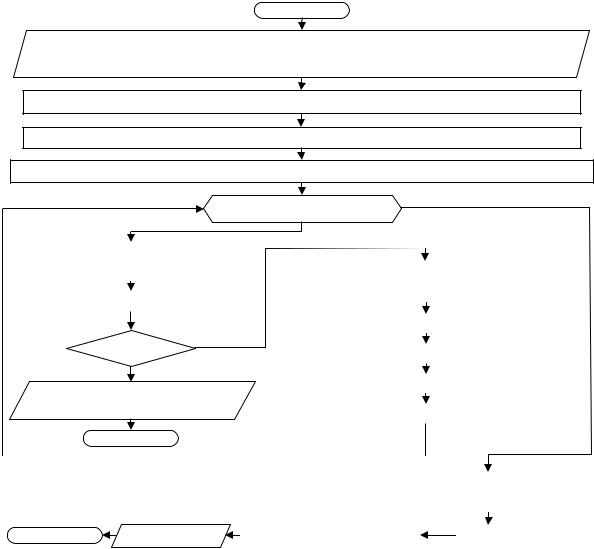
В интервалах элементарных приращений обобщенных координат dq7…dq10 величины управляемых координат q7, q7 и массы груза mГР могут рассматриваться как константы, что позволяет использовать численный способ интегрирования с постоянным шагом (рис. 4.30).
Для численной реализации разработанной методики при композиции перемещений сразу по нескольким управляемым координатам целесообразна дискретная параметрическая форма представления всех управляемых координат:
q7=q7нач+t·dq7; q8=q8нач+t·dq8; q9=q9нач+t·dq9; q10=q10нач+t·dq10, (4.153)
235
где t=1,2,…,n – параметр; n – число частей разбиения интервала по каждой управляемой координате; dq7, dq8, dq9, dq10 – действительные текущие значения шагов дискретизации по управляемым координатам.
Пуск |
1 |
2 |
|
|
Ввод исходных данных: m2, m3, m4, mГР, x2,2, x3,31, y3,32, x3,33, x4,41, y3,42, y4,43, x2,54,
α0, cГ1, cГ2, q7нач, q7кон, q8нач, q8кон, q9нач, q9кон, q10нач, q10кон, q7, q8, q9, q10
3
n=(|q7кон–q7нач|)/ q7+(|q8кон–q8нач|)/ q8+(|q9кон–q9нач|)/ q9+(|q10кон–q10нач|)/ q10
4
dq7=(q7кон–q7нач)/n; dq8=(q8кон–q8нач)/n; dq9=(q9кон–q9нач)/n; dq10=(q10кон–q10нач)/n
5
A7=0;A8=0;A9=0;A10=0; mП=m2+m3+m4+mГР; mпод=m3+m4+mГР; m4,5=m4+mГР
|
|
|
|
|
t=1:n |
6 |
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
12 |
||
|
q8=q8нач+t·dq8; q9=q9нач+t·dq9; |
|
|
||||
|
q10=q10нач+t·dq10 |
8 |
Определение G7, G8, G9 по (4.144), |
||||
|
|
|
|
G10 по (4.148), (4.149) |
|
||
Определение mГР max по (4.145) |
|
|
|
||||
|
|
|
13 |
||||
|
|
|
|
|
|
|
|
9 |
Да |
|
|
|
dA7=G7∙dq7; A7=A7+dA7 |
||
|
|
|
14 |
||||
|
mГР ≤ mГР max |
|
|
|
|
||
|
|
10 |
|
dA8=G8∙dq8; A8=A8+dA8 |
|||
|
Нет |
|
|
15 |
|||
|
|
|
|
||||
|
|
|
dA9=G9∙dq9; A9=A9+dA9 |
||||
|
Вывод сообщения о недопус- |
|
|
|
|
||
|
|
|
|
|
16 |
||
|
тимой конфигурации |
|
|
|
|
||
|
|
|
|
dA10=G10∙dq10; A10=A10+dA10 |
|||
|
Останов |
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
17
|
|
|
|
|
|
Определение T по |
|
||
21 |
20 |
|
|
|
методике раздела 4.6 |
|
|||
|
|
|
|
19 |
|
18 |
|||
Останов |
Вывод Ae (C) |
Ae (C)=A7+A8+A9+A10+AT |
|
AT=T∙kT |
|||||
Рис. 4.30. Блок-схема обобщенного алгоритма определения энергетической Ae (C) функции стоимости изменения управляемых обобщенных координат
Значение n предлагается определять по методу «Манхэттен» [74]:
n=(|q7кон–q7нач|)/ q7+(|q8кон–q8нач|)/ q8+ |
|
+(|q9кон–q9нач|)/ q9+(|q10кон–q10нач|)/ q10, |
(4.154) |
где q7, q8, q9, q10 – максимально допустимые шаги дискретизации по координатам q7, q8, q9 и q10 соответственно.
Тогда действительные текущие значения шагов дискретизации по управляемым координатам определятся зависимостями:
236
dq7=(q7кон – q7нач)/n; |
dq8=(q8кон – q8нач)/n; |
|
dq9=(q9кон – q9нач)/n; |
dq10=(q10кон–q10нач)/n. |
(4.155) |
Блок-схема обобщенного алгоритма, реализующего разработанную методику определения энергетической и экономической функции стоимости изменения управляемых обобщенных координат ГПК приведена на рис. 4.30.
Экономическая функция стоимости изменения управляемых обобщенных координат ГПК также может быть определена по описанной методике, поскольку в выражении (4.150) присутствует фиксированная составляющая AT, зависящая от времени перемещения. Изменение коэффициента kT (4.151) позволяет учесть соотношение между стоимостью времени работы машины и стоимостью ГСМ. От времени работы машины в свою очередь зависят расходы на производство текущих ремонтов и заработная плата машиниста и стропальщиков. Все это позволяет учесть коэффициент kT.
Выполненное построение регрессионной модели определения энергетических затрат рабочего процесса ГПК позволяет получить значения израсходованного ДВС ГПК топлива при перемещении грузов по заданным траекториям, не прибегая к имитационному моделированию, применение которого связано со значительными вычислительными и временными издержками. Это открывает возможность использования разработанной регрессионной модели при поиске оптимальной траектории перемещения груза ГПК в сложноорганизованном пространстве с препятствиями.
Разработанная методика универсальна и позволяет вести учет энергетических и экономических затрат на перемещение грузов стреловыми и другими самоходными стреловыми кранами различных конструкций, оснащенными ДВС, в трехмерном пространстве с препятствиями.
4.8. Методика планирования траектории в пространстве конфигураций грузоподъемного крана на основе алгоритма вероятностной дорожной карты с ограничениями
по устойчивости
Положение груза в пространстве конфигураций ГПК на примере ГПК описывается четырьмя управляемыми координатами: q7, q8, q9, q10. Необходимо разработать методику планирования оптимальной по
237
заданному критерию траектории перемещения груза в пространстве конфигураций машины на основе алгоритма ВДК. Алгоритм ВДК был выбран как наиболее простой в вычислительной реализации для постовленной задачи, учитывая значительные вычислительные издержки на вычисление значений целевой функции L (T, Ae или C). Он имел наименьшую временную сложность.
Описание алгоритма ВДК поиска оптимальной траектории перемещения груза в пространстве конфигураций ГПК.
Предложенный модифицированный алгоритм ВДК заключается в следующей последовательности шагов:
1. Задание численных значений исходных данных: sш=(xш0, yш0,
zш0)=(q1, q2, q3); sнач=(xн0, |
yн0, |
zн0); |
sкон=(xк0, |
yк0, |
zк0); |
{ Ris };{ Rio3 };{ Rio4 };{ Rig }; [YПР]; |
ng; |
δq7; |
uш; u8; nЛ; |
uл; lл; |
δopt; |
lзап_г; lзап_в; v7к пред; v8,1; v8,2; v9,1; v9,2; v9,3; v9,4; q9гран; mГР; mГРгран; v10,1; v10,2; v10,3; v10,4; q8min; q8max; q9min; q9max; q10min; q10max; q7; q8; q9; q10; m1; m2; m3; m4; x2,2; x3,31; y3,32; x3,33; x4,41; y3,42; y4,43; x2,54; α0; cГ1; cГ2; k7,1, k7,2, k8,1, k8,2, k8,3, k8,4, k9,1, k9,2, k10,1, k10,2.
Параметры соответствуют описанным при постановке задачи в разделе 4.1 и в методиках для определения функций стоимости изменения управляемых обобщенных координат (разделы 4.6 и 4.7), за исключением следующего собственного параметра алгоритма ВДК, задаваемого эмпирически: ng – количество вершин графа дорожной карты.
2. В цикле, меняющем значение обобщенной координаты q6 (угла поворота базового шасси ГПК вокруг вертикальной оси инерциальной системы координат Y0) от 0 до 360° с заданным шагом uш, выполняется проверка на пересечение характерных точек базового шасси { Ris } и поверхности реальных препятствий [YПР].
Для этого на каждом шаге по заданным значениям линейных координат базового шасси q1, q2, q3 (исходным данным), текущему в цикле значению q6 и принятым постоянным значениям q4=0; q5=0, формируется с использованием метода однородных координат [12, 72, 127] матрица перехода T1=A1 от системы координат базового шасси
крана к инерциальной системе координат: |
|
T1=Ax1∙Ay1∙Az1∙Aγ1∙Aν1 Aω1, |
(4.156) |
где шесть матриц-сомножителей выражают три линейных (Ax1, Ay1, Az1) и три угловых (Aγ1, Aν1, Aω1) перемещения для общего случая преобразования систем координат в трехмерном пространстве.
238
Элементы каждой из приведенных матриц-сомножителей размером 4×4 содержат одну из шести обобщенных координат ГПК q1,…, q6. С учетом того, что (q4=0; q5=0), матрица T1 будет иметь вид
é– cosq6 |
|
0 |
|
−sin q6 |
|
q1 |
ù |
|
||
|
|
|
|
|||||||
ê |
|
0 |
|
1 |
|
0 |
|
q2 |
ú |
|
T1= ê |
|
|
|
|
|
|
|
ú . |
(4.157) |
|
sin q6 |
|
0 |
|
cos q6 |
|
q3 |
||||
ë |
|
|
|
|
|
|
|
|
û |
|
ê |
|
0 |
|
0 |
|
0 |
|
1 |
ú |
|
Каждый из векторов множества { Ris } вида |
|
|
||||||||
v |
yis |
|
zis |
|
1]T ; is [1; cs], |
(4.158) |
||||
Ris = [xis |
|
|
||||||||
где xis, yis, zis – координаты точки is базового шасси в собственной локальной декартовой системе координат шасси (№ 1), переносится в инерциальную систему координат:
Ris,0 =T1 × Ris ; is [1; cs], |
(4.159) |
здесь Ris,0 – вектор положения точки is в инерциальной системе координат вида
v |
= [xis,0 |
yis,0 zis,0 1]T . |
(4.160) |
Ris,0 |
Для каждой точки is [1; cs] выполняется проверка условия превышения ее вертикальной координаты yis,0 над соответствующей вертикальной координатой поверхности препятствий с теми же коорди-
натами xis,0, zis,0:
yis,0≥YПР(xis,0, zis,0). (4.161)
В случае невыполнения данного условия для всех возможных значений q6 делается вывод о невозможности расположения базового шасси в точке с координатами q1, q2, q3 (переменная break=1), и алгоритм завершает свою работу. В противном случае расположение возможно, выполнение алгоритма продолжается (переменная break=0).
3. Определение начального qn7 и конечного qk7 значений координаты q7, а также граничных значений диапазонов управляемых координат для начальной и конечной точек положения условного центра груза без учета препятствий по методике раздела 4.3 при нулевых уг-
лах наклона базового шасси [103, 107, 109, 112, 113, 115, 116]:
239