Материал: 2426
Me(L* )= |
1 |
×((L* ) |
+ (L* ) |
), |
(3.159) |
|
2 |
(ne 2) |
(ne 2)+1 |
|
|
где вектор значений отдельных экспериментов {(L*)i}ine=1 предварительно отсортирован по возрастанию; количество ne – четное.
20,6 |
|
|
20,4 |
Me(L*н) |
|
20,2 |
||
|
||
20 |
L *н |
|
19,8 |
||
|
||
100 |
200rкол 300 |
|
20,6 |
|
|
20,4 |
|
|
20,2 |
Me(L*н) |
|
|
||
20 |
L *н |
|
19,8 |
||
|
|
50 |
150 |
G |
|
350 |
20,5 |
Me(L*н) |
|
|
|
|
20 |
|
|
|
||
19,5 |
|
|
|
|
|
19 |
|
|
|
|
|
18,5 |
|
L *н |
|
|
|
18 |
0,2 |
0,4 |
0,6 |
α |
0,8 |
|
0,8 |
0,6 |
0,4 |
β |
0,2 |
15,4 |
|
|
15,3 |
Me(L*) |
|
15,2 |
||
|
||
15,1 |
|
|
15 |
L * |
|
14,9 |
||
14,8 |
|
100 |
200 rкол |
300 |
|
15,5 |
|
Me(L*) |
|
15 |
|
|
|
14,5 |
L * |
|
|
|
|
|
|
14 |
|
|
|
50 |
150 |
G |
350 |
15,2 |
|
|
|
|
15,15 |
Me(L*) |
|
|
|
15,1 |
|
|
|
|
15,05 |
|
|
|
|
15 |
|
|
|
|
14,95 |
L * |
|
|
|
14,9 |
|
|
|
|
14,850,2 |
0,4 |
0,6 |
α |
0,8 |
0,8 |
0,6 |
0,4 |
β |
0,2 |
0,9 |
|
|
|
|
|
0,8 |
|
σ(L*н) |
|
|
|
0,7 |
|
|
|
||
|
|
|
|
|
|
0,6 |
|
σ(L*) |
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|
|
|
100 150 200 250 rкол |
350 |
||||
0,7 |
|
|
|
|
|
0,65 |
|
σ(L*н) |
|
|
|
|
|
|
|
|
|
0,6 |
|
σ(L*) |
|
|
|
|
|
|
|
||
0,55 |
|
|
|
|
|
|
50 |
150 |
G |
|
350 |
1 |
|
σ(L*н) |
|
|
|
0,8 |
|
|
|
|
|
|
|
|
|
|
|
0,6 |
|
|
|
|
|
0,4 |
|
|
|
|
|
0,2 |
|
|
σ(L*) |
|
|
0 |
0,2 |
0,4 |
0,6 |
α |
0,8 |
|
0,8 |
0,6 |
0,4 |
β |
0,2 |
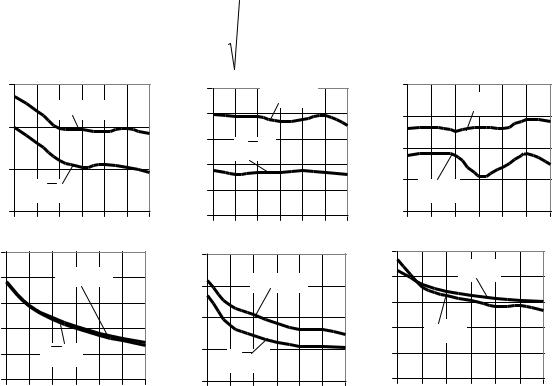
Рис. 3.39. Некоторые результаты экспериментов с использованием алгоритма роевого интеллекта на тестовом примере с детерминированным расположением препятствий
|
ne |
æ |
|
|
* |
* |
ö |
|
|
|
|
|
|||||||
σ (L* )= |
å |
ç |
Lн |
- (Lн )i |
÷ . |
(3.160) |
|||
|
|
||||||||
н |
|
ç |
|
|
|
ne |
÷ |
|
|
|
i=1è |
|
|
ø |
|
|
|||
160
18,95 |
|
Me(L*н) |
|
18,9 |
|
18,85 |
|
L *н |
|
18,8 |
70 |
10 20 30 40 50 G |
20,5 |
|
|
20 |
Me(L*н) |
|
19,5 |
|
|
19 |
|
|
18,5 |
L *н |
|
18 |
|
|
|
10 20 30 40 50 C |
70 |
|
|
|
|
|
|
|||
|
ne æ |
|
* - (L* ) ö |
|
||||
σ (L)= |
L |
|
||||||
åç |
|
|
|
i |
÷ . |
(3.161) |
||
|
|
ne |
|
|||||
|
i=1ç |
|
÷ |
|
|
|||
|
è |
|
|
|
ø |
|
|
|
14,2 |
Me(L*) |
|
0,7 |
|
σ(L*н) |
|
|
|
|
|
|
|
|||
14,15 |
|
|
0,65 |
|
|
|
|
14,1 |
L * |
|
0,6 |
|
|
|
|
14,05 |
|
|
|
|
|
||
|
|
0,55 |
|
|
|
|
|
14 |
|
|
σ(L*) |
|
|
|
|
13,95 |
10 20 30 40 50 G 70 |
0,5 |
10 20 30 40 50 G 70 |
||||
|
|
||||||
14,6 |
|
|
1 |
|
σ(L*н) |
|
|
14,4 |
* |
|
0,8 |
|
|
|
|
Me(L ) |
|
0,6 |
|
|
|
|
|
14,2 |
|
|
|
|
|
|
|
|
|
0,4 |
σ(L*) |
|
|
||
14 |
|
|
|
|
|||
L * |
|
0,2 |
|
|
|
|
|
|
|
|
|
|
|
||
13,8 |
|
|
0 |
|
|
C |
|
10 20 30 40 50 C |
70 |
10 20 30 |
40 50 |
70 |
|||
Рис. 3.40. Некоторые результаты экспериментов с использованием алгоритма на основе генетического подхода на тестовом примере с детерминированным расположением препятствий
Алгоритм роевого интеллекта (2). Исходные данные для экспери-
ментов принимали следующие значения (по умолчанию): sнач=(0, 2, 5, 0, 0); sкон=(10, 2, 5, 0, 0); imax=20; jmax=20; kmax=20; lmax=5; mmax=17; rкол=200;
α=0,5; β=0,5; er=3; G=200; cγω=1; u=π/8; T(1)= [τi1,j1]ing1, j1=1 =0,1; δopt=0,001; lзап_г=0,5; lзап_в=0,5. Матрица [Yпр] и множество векторов { Rig } формиро-
вались по (3.154) и (3.155) соответственно.
На основе анализа представленных (рис. 3.39) и других полученных для алгоритма роевого интеллекта зависимостей были приняты следующие значения варьируемых собственных параметров алгоритма для дальнейшего сравнения с другими алгоритмами при стохастическом формировании препятствий: rкол=200; α=0,5; β=0,5; G=200. Значения остальных параметров сохранялись по умолчанию.
Алгоритм на основе генетического подхода (3). Исходные дан-
ные для экспериментов принимали следующие значения (по умолча-
нию): sнач=(0, 2, 5, 0, 0); |
sкон=(10, 2, 5, 0, 0); imax=20; jmax=20; kmax=20; |
lmax=5; mmax=17; G=30; |
C=50; E=C/2; M=0,1∙C; cγω=1; u=π/8; |
|
161 |
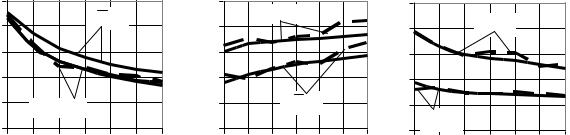
δopt=0,001; lзап_г=0,5; lзап_в=0,5. Матрица [Yпр] и множество векторов { Rig } формировались по (3.154) и (3.155) соответственно.
На основе анализа представленных (рис. 3.40) и других полученных для алгоритма на основе генетического подхода зависимостей были приняты следующие значения варьируемых собственных параметров алгоритма для дальнейшего сравнения с другими алгоритмами при стохастическом формировании препятствий: G=50; C=50. Значения остальных параметров сохранялись по умолчанию.
Алгоритм вероятностной дорожной карты (5). Исходные дан-
ные для экспериментов принимали следующие значения (по умолча-
нию): sнач=(0, 2, 5, 0, 0); sкон=(10, 2, 5, 0, 0); imax=20; jmax=20; kmax=20; lmax=5; mmax=17; ng=400; cγω=1; u=π/8; δopt=0,001; lзап_г=0,5; lзап_в=0,5.
Матрица [Yпр] и множество векторов { Rig } формировались по (3.154)
и (3.155) соответственно. |
|
|
|
|
|
|
||||
22 |
|
L *н |
|
16,2 |
Me(L*) |
|
2,5 |
|
* |
|
21 |
|
|
16 |
|
|
|||||
|
|
|
|
|
|
2 |
σ(L н) |
|||
20 |
|
|
|
15,8 |
|
|
|
1,5 |
|
|
19 |
|
|
|
15,6 |
|
|
|
1 |
|
|
18 |
Me(L |
* |
|
15,4 |
|
L * |
|
0,5 |
σ(L*) |
|
17200 |
н) |
|
15,2200 |
|
|
|
0200 |
|
||
600 |
1000 |
1400 |
600 |
1000 |
1400 |
600 |
1000 1400 |
|||
|
|
|
ng |
|
|
ng |
|
|
ng |
|
Рис. 3.41. Некоторые результаты экспериментов с использованием алгоритма вероятностной дорожной карты на тестовом примере с детерминированным расположением препятствий: ─ – при заполнении пространства случайно сформированными точками; - - - – при заполнении пространства квазислучайными точками (последовательности Холтона)
При исследовании алгоритма вероятностной дорожной карты была реализована возможность заполнения пространства обобщенных координат груза квазислучайными точками в виде последовательностей Холтона [184, 221, 235]. Точки Холтона строятся по известным детерминированным зависимостям [184] и обеспечивают равномерное заполнение пространства. Некоторые методики и алгоритмы оптимизации показывают лучшие результаты при использовании последовательностей Холтона, чем при использовании случайных последовательностей. Доказано преимущество использования последовательностей Холтона перед заполнением пространства равномерной сетью [184, 221, 235].
162
Однако при решении данной задачи поиска оптимальной траектории груза в пространстве его обобщенных координат с учетом препятствий использование последовательностей Холтона не оказало существенного влияния на результаты (рис. 3.41) ввиду достаточно большого количества точек и вследствие этого многовариантности решений.
На основе анализа представленных и других полученных для алгоритма вероятностной дорожной карты зависимостей было принято следующее значение варьируемого собственного параметра алгоритма (числа точек) для дальнейшего сравнения с другими алгоритмами при стохастическом формировании препятствий: ng=800. Значения остальных параметров сохранялись по умолчанию.
Y0
Z0
б)
X0
а)
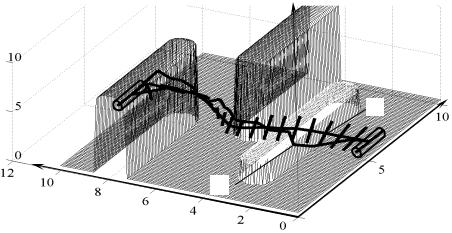
Рис. 3.42. Примеры найденной алгоритмом на основе генетического подхода траектории на тестовом примере с детерминированным расположением препятствий: а – до локальной оптимизации; б – после локальной оптимизации
Примеры найденной алгоритмом на основе генетического подхода траектории S* (точки начала координат системы груза) и этой же траектории после заключительной локальной оптимизации с указанием положений осей груза в форме цилиндра приведены на рис. 3.42, а и б соответственно. Для неоптимизированной траектории положения осей цилиндра не показаны, чтобы не затемнять рисунок.
Сравнительный анализ разработанных алгоритмов и методик на их основе. Для сравнения алгоритмов использовались статистические критерии, полученные при использовании различных методик, но для одних и тех же численных значений исходных данных задачи [Yпр], которые формировались для каждого эксперимента случайным образом.
Была проведена серия из 10000 компьютерных экспериментов, моделирующих процесс поиска оптимальной траектории объемного
163
объекта-груза в среде с полидистантными поверхностями, построенными вокруг реальных поверхностей препятствий [Yпр], сформированных случайным образом из сочетания нескольких параллелепипедов, каждый из которых имеет случайные размеры.
Число параллелепипедов n в каждом эксперименте генерировалось по равномерному закону распределения случайной величины в интервале от 1 до 15. Размеры каждого параллелепипеда формировались в пределах (x×y×z) от 0×0×0 УЛЕ до 4×5×4 УЛЕ также по равномерному закону распределения. Допускалось перекрытие объемов и поверхностей параллелепипедов при их наложении [88, 124].
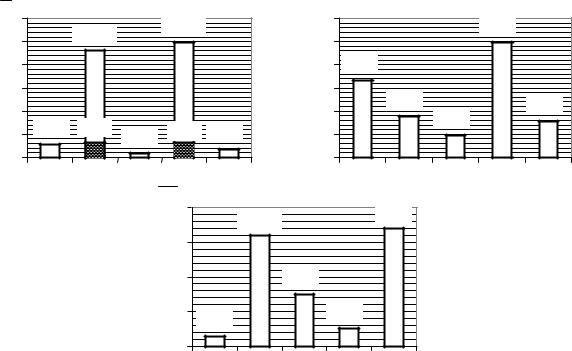
Для каждого эксперимента определялись путем непосредственных вычислительных измерений, реализованных программно, значения Tр и Me и рассчитывалось по результатам вычислительных измерений значение Lусл по (3.21), (3.22). Некоторые результаты сравнительного анализа методик и алгоритмов по принятым критериям оценки эффективности приведены на рис. 3.43 [124]. Исследования проводились на программных реализациях методик и алгоритмов в среде MS Visual C++ на ПК средней производительности (AMD Athlon 64 X2 Dual Core Processor 5600+ 2.90 GHz).
T |
р |
,с |
|
|
24,897 |
|
|
6 |
Me ,Мб |
|
4,953 |
|
||
|
|
23,196 |
|
|
|
|
|
|
|
|||||
25 |
|
|
|
|
5 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
20 |
|
|
|
|
|
|
|
4 |
3,315 |
|
|
|
||
15 |
|
|
|
|
|
|
|
3 |
|
1,758 |
|
|
1,561 |
|
10 |
|
|
|
|
|
|
|
2 |
|
0,957 |
|
|||
2,611 |
3,31 |
|
2,93 |
|
|
|
|
|
|
|||||
5 |
0,782 |
1,782 |
1 |
|
|
|
|
|||||||
|
|
|
|
|
||||||||||
0 |
1 |
2 |
3 |
|
4 |
|
5 |
0 |
1 |
2 |
3 |
4 |
5 |
|
|
|
|
|
|
||||||||||
|
|
|
|
δLусл ,% |
15,919 |
|
|
17,01 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
7,506 |
|
|
|
|
|
|
|
|
|
|
5 |
1,494 |
2,601 |
|
|
|
|
|||
|
|
|
|
|
0 |
|
1 |
2 |
3 |
4 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Рис. 3.43. Результаты сравнительного анализа методик и алгоритмов по принятым критериям оценки эффективности: 1 – направленный волновой алгоритм; 2
–алгоритм роевого интеллекта; 3 – алгоритм на основе генетического подхода; 4
–алгоритм декомпозиции линейных и угловых координат; 5 – алгоритм вероят-
164