Материал: 2426
3
54
j
j=1; j≤jmax; j=j+1
k 55 k=1; k≤kmax; k=k+1
l 56 l=1; l≤lmax; l=l+1
m |
57 |
m=1;m≤mmax;m=m+1 |
|
Нет |
58 Да |
Vfront(i+1,j,k,l,m)=1
Vfront(i+1,j,k,l,m)=2 59
|
|
60 |
|
m |
|||
|
|||
l |
61 |
||
|
|||
k |
62 |
||
|
|||
j |
63 |
||
|
|||
i 64
65
jкон= yк0/ l
yк0/ l ; kкон=
; kкон= zк0/ l
zк0/ l ; lкон=
; lкон= (γк0–γmin)/ u
(γк0–γmin)/ u ; mкон=
; mкон= (ωк0–ωmin)/ u
(ωк0–ωmin)/ u
i2=imax; j2=jкон; k2=kкон; l2=lкон; m2=mкон
66 Rodтек=Vrod(i2,j2,k2,l2,m2) 67
i |
68 |
i=(imax–1); i≥1; i=i–1 |
69 |
|
dm=Rodтек%10;Rodтек=Rodтек–dm; dl=(Rodтек%100)/10;Rodтек=Rodтек–dl∙10; dk=(Rodтек%1000)/100;
Rodтек=Rodтек–dk∙100;dj=Rodтек%1000
70dj= dj–2; dk= dk–2; dl= dl–2; dm=dm–2
71j=j2+dj; k=k2+dk; l=l2+dl; m=m2+dm
72 |
|
p=i; xp=i∙Δl; yp=j∙Δl; zp=k∙Δl; |
|
||
γp=(l–0,5∙lmax)∙Δu; ωp=(m–0,5∙mmax)∙Δu |
|
||||
|
|
||||
73 |
|
|
|
||
|
i2=i; j2=j; k2=k; l2= l; m2=m |
|
|||
|
|
|
|
|
74 |
|
|
Rodтек=Vrod(i2,j2,k2,l2,m2) |
|
||
|
|
|
|
||
|
|
i |
75 |
|
|
|
|
|
|
|
|
76

 Дискретная локальная оптимизация найденной траектории по методике раздела 3.5
Дискретная локальная оптимизация найденной траектории по методике раздела 3.5 

Вывод резуль- |
77 |
78 |
|
Останов |
|
татов: S*, L* |
|
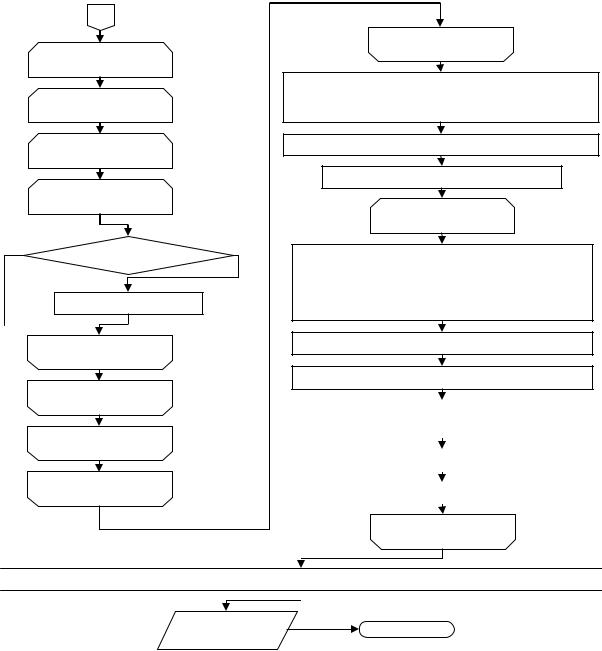
Рис. 3.36. Блок-схема модифицированного волнового алгоритма для пяти учитываемых обобщенных координат груза (окончание)
7.Выполняется локальная оптимизация траектории S* по методике, изложенной в разделе 3.5.
8.Определяется значение целевой функции L* оптимизированной траектории S* по (3.19).
9.Вывод результатов: L*, S*. Окончание работы алгоритма.
Блок-схема модифицированного волнового алгоритма перемещения груза, положение которого определяют 3 линейные и 2 угловые обобщенные координаты, приведена на рис. 3.36.
155
Вычислительные реализации модифицированного волнового алгоритма и описанной методики на его основе в средах Microsoft Visual C++ и MATLAB показали работоспособность и эффективность алгоритма для решения поставленной задачи.
3.11. Сравнительный анализ алгоритмических и программных реализаций методик планирования траектории
Необходимо провести сравнение разработанных алгоритмов и методик на их основе по принятым в монографии критериям оценки эффективности. Для этого было проведено несколько серий вычислительных экспериментов.
Наиболее часто при работе ГПК на строительных площадках, в цехах и складских помещениях встречаются препятствия в виде стен, перекрытий, стеллажей, контейнеров, столбов и свай, которые могут быть описаны в форме параллелепипедов различных размеров [88].
Методом эталонных тестов производилось сравнение разработанных методик поиска оптимальной траектории объекта на основе: 1
– направленного волнового алгоритма; 2 – алгоритма роевого интеллекта; 3 – генетического подхода; 4 – алгоритма декомпозиции линейных и угловых координат; 5 – алгоритма вероятностной дорожной карты; 6 – распараллеленного алгоритма роевого интеллекта; 7 – распараллеленного алгоритма декомпозиции линейных и угловых координат. Для этого были проведены несколько серий вычислительных экспериментов, моделирующих процесс поиска оптимальной по значению целевой функции траектории объекта-груза в среде с полидистантными поверхностями, построенными вокруг реальных поверхностей препятствий.
Исходные поверхности препятствий формировались случайным образом из сочетания нескольких параллелепипедов, каждый из которых имел случайные размеры. Для всех экспериментов рассматривалось рабочее пространство в виде куба с размерами 10×10×10 УЛЕ (см. рис. 3.1). Линейные координаты начальной и конечной точек положения условного центра груза (начала локальной системы координат груза OgХgYgZg) принимались постоянными для всех экспериментов. Начальная точка имела линейные координаты (УЛЕ): [xн0; yн0; zн0]=[0; 2; 5], конечная – [xк0; yк0; zк0]=[10; 2; 5]. Начальные и конечные значения угловых координат также принимали постоянные нулевые значения (рад): [γн0; ωн0]=[0; 0]; [γк0; ωк0]=[0; 0].
156
Количество разбиений каждой траектории на кусочно-линейные участки принималось равным imax=20. Соответственно максимальные значения индексов остальных координат груза при поиске траектории принимались равными jmax=20; kmax=20; lmax=5; mmax=17.
Сочетание линейных и угловых координат груза позволяет представить область перемещений груза в виде гиперкуба с размерами равномерной сетки индексов (РСИ) 20×20×20×5×17.
В то же время для задания исходной поверхности препятствий, построения полидистантных поверхностей вокруг препятствий и для проведения дискретной локальной оптимизации найденных траекторий использовалось более подробное описание рабочей области в трехмерном пространстве в виде куба с размерами (РСИ) 100×100×100. То есть использовался иерархический подход, при котором задание исходной поверхности и локальная оптимизация траектории проводились с более мелким шагом описания препятствий (0,1 УЛЕ), а собственно поиск траектории с использованием разработанных методик – с более крупным шагом описания препятствий (0,5 УЛЕ). Это позволило более точно провести локальную оптимизацию.
Пуск |
1 |
|
3 |
|
|
||||
2 |
|
|
i1=0 |
|
|
4 |
|||
|
|
|
|
|
|||||
Ввод исходных данных: |
|
|
i |
|
|||||
|
|
|
|
||||||
|
|
|
|
|
|||||
YЭ01; kм |
|
|
i=1;i≤jmax;i=i+kм |
|
|||||
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
i1=i1+1 |
|
|||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
k1=0 |
|
|
7 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
k |
|
|||
|
|
|
|
|
|
|
|||
|
|
|
k=1;k≤kmax;k=k+kм |
|
|||||
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
k1=k1+1 |
9 |
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
12 |
YЭ05(i1,k1)=YЭ01(i,k) |
||||||
|
|
|
|||||||
Вывод результатов: |
|
|
k |
|
10 |
||||
|
|
|
|
||||||
YЭ05 |
|
|
|
|
|
|
|
|
11 |
|
13 |
|
|
|
i |
|
|||
Останов |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
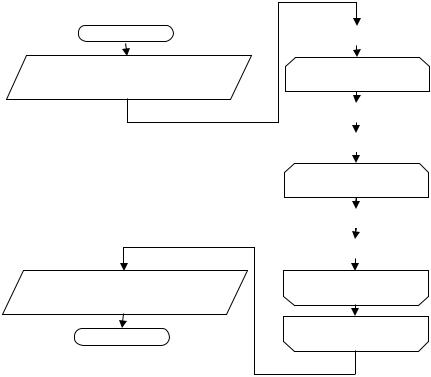
Рис. 3.37. Блок-схема алгоритма редукции полидистантной поверхности вокруг препятствий
Применение иерархического подхода вызвано большой размерностью задачи, сложность которой экспоненциально возрастает при
157
уменьшении шага дискретизации координат. Переход от исходного к укрупненному описанию линейных координат выполнялся методом редукции [164]. Использовался коэффициент масштабирования kм линейных координат, значение которого принималось равным kм=5. Алгоритм перехода от полидистантной поверхности YЭ01, описанной с мелким шагом, к поверхности YЭ05 с крупным шагом приведен на рис. 3.37.
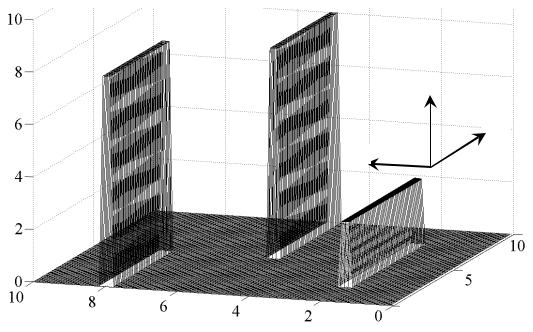
Для методик, использующих элементы вероятностного выбора (на основе алгоритмов 2, 3 и 5), предварительно были проведены несколько серий экспериментов, по 1200 независимых экспериментов для каждого сочетания значений варьируемых параметров, на рабочей области с одинаковым детерминированным расположением препятствий, описываемым следующими условиями на РСИ 100×100×100 (в качестве примера, рис. 3.38):
Yпр(i,k)=2,5 УЛЕ – при (29≤i≤31) |
(20≤k≤80); |
|
Yпр(i,k)=8,0 УЛЕ – при (49≤i≤51) |
(50≤k≤100); |
|
Yпр(i,k)=8,0 УЛЕ – при (79≤i≤81) |
(1≤k≤50); |
|
Yпр(i,k)=0,0 УЛЕ – в остальных случаях. |
(3.154) |
|
Y0 Z0
X0
Рис. 3.38. Рабочая область тестового примера с детерминированным расположением препятствий
Груз в форме цилиндра с габаритными размерами (габаритный диаметр 0,5 УЛЕ и высота 2,0 УЛЕ), был представлен в виде набора точек (cг=12) на поверхности объемного тела с координатами в УЛЕ:
158

{ Rig }={[0,25;0;1;1]; [0,25;0;0;1]; [0,25;0;–1;1]; [–0,25;0;1;1];
[–0,25;0;0;1]; [–0,25;0;–1;1]; [0;0,25;1;1]; [0;0,25;0;1]; [0;0,25;–1;1]; [0;–0,25;1;1]; [0;–0,25;0;1]; [0;–0,25;–1;1]}. (3.155)
Проведение вычислительных экспериментов на тестовом примере с детерминированным расположением препятствий позволило обосновать рациональные значения основных внутренних параметров соответствующих алгоритмов с элементами вероятностного выбора для решения поставленной задачи и для последующего сравнения с детерминированными алгоритмами.
Результаты экспериментов на тестовом примере с детерминированным расположением препятствий приведены ниже. Для оценки алгоритмов в данных сериях экспериментов использовались 6 частных показателей: 1) математическое ожидание значений целевой функции неоптимизированной найденной траектории L *н; 2) математическое ожидание значений целевой функции той же траектории, оптимизированной при помощи методики дискретной локальной оптимизации L *; 3) медиана значений целевой функции неоптимизированной траектории Me(L*н); 4) медиана значений целевой функции оптимизированной траектории Me(L*); 5) стандартное отклонение значений целевой функции неоптимизированной траектории σ(L*н); 6) стандартное отклонение значений целевой функции оптимизированной траектории σ(L*). Показатели по дискретному ряду вычисляются по следующим зависимостям [5, 18, 19, 24, 38, 70, 131]:
|
|
* = |
1 |
ne |
(L* ) |
|
|
|
L |
× å |
, |
(3.156) |
|||
|
|
||||||
|
н |
ne |
i=1 |
н i |
|
|
|
|
|
|
|
|
|
||
где L*н – значение целевой функции неоптимизированной траектории для данного эксперимента; ne – число независимых экспериментов.
|
|
* = |
1 |
ne |
(L* ) |
|
|
|
L |
× å |
, |
(3.157) |
|||
|
ne |
||||||
|
|
|
i=1 |
i |
|
|
где L* – значение целевой функции оптимизированной траектории для данного эксперимента; ne – число независимых экспериментов.
Me(L* |
)= |
1 ×((L* |
) |
+ (L* |
) |
), |
(3.158) |
|
н |
|
2 |
н |
(ne 2) |
н |
(ne 2)+1 |
|
|
|
|
|
|
|
|
|
|
|
где вектор значений отдельных экспериментов {(L*н)i}ine=1 предварительно отсортирован по возрастанию; количество ne – четное.
159