Материал: 2334
вое пространство двухмерное, т. е. представляет собой фазовую плоскость, а для систем третьего порядка фазовое пространство представляет собой трехмерное пространство. При более высоком порядке п – это соответственно n-мерное пространство [30].
Состоянию системы, определяемому значениями ее п координат в каждый момент времени, соответствует определенная точка фазового пространства – изображающая точка. При изменении состояния системы изображающая точка будет перемещаться, описывая траекторию, которая называется фазовой траекторией. Фазовая траектория дает полное представление о характере процесса в системе, кроме его временной оценки, поскольку время здесь из рассмотрения исключе-
но [30].
Особенности нелинейных систем требуют при рассмотрении их устойчивости говорить не об устойчивости системы вообще, а об устойчивости определенного ее статического или динамического режима при определенных отклонениях от него. В связи с этим при изучении нелинейных систем вводятся понятия устойчивости в малом, в большом и в целом.
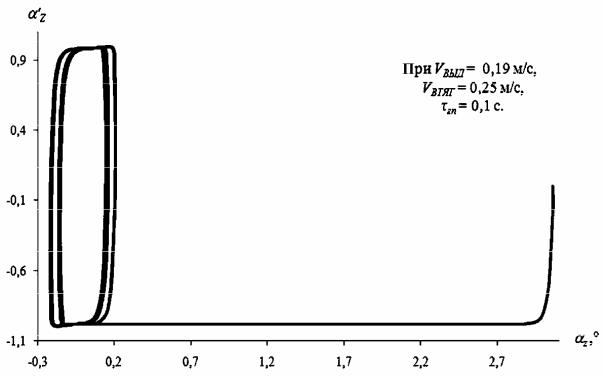
Рис. 4.5. Фазовый портрет процесса управления платформой строительной машины
Устойчивость в малом – это устойчивость при бесконечно малых оклонениях от исходного режима. Устойчивость в большом – это ус-
95
тойчивость при конечных отклонениях, возможных в данной системе по условиям ее работы. Устойчивость в целом – это устойчивость при неограниченных отклонениях, т. е. при отсутствии каких-либо ограничений их. Нелинейная система может быть устойчива в малом, но неустойчива в большом [30].
На рис. 4.5 представлена фазовая траектория процесса управления положением платформой строительной машины. Проанализировав фазовую траекторию процесса управления положением платформы, можно сделать вывод, что процесс управления положением платформы устойчив в большом и не устойчив в малом. Устойчивые собственные колебания с постоянной амплитудой, определяемой нелинейностями системы, которые можно видеть на рис. 4.5, называются автоколебаниями.
4.4. Оптимизационный синтез основных параметров устройства управления положением платформы строительной машины
При дальнейшем исследовании процесса управления платформой строительной машины в качестве оптимизируемых параметров приняты VВТЯГ и α. Величина времени запаздывания гидропривода системы управления принята равной τгп = 0,1 с.
В табл. 4.1 представлены значения варьируемых при исследовании математической модели процесса управления положением платформы строительной машины параметров VВТЯГ и α.
Т а б л и ц а 4.1. Значения варьируемых параметров устройства управления
Варьируемые параметры |
VВТЯГ, м/с |
α, |
1 |
0,05 |
0,1 |
2 |
0,1 |
0,15 |
3 |
0,15 |
0,2 |
4 |
0,2 |
0,25 |
5 |
0,25 |
0,3 |
Шаг изменения |
0,05 |
0,05 |
Таким образом, дальнейшие исследования были направлены на получение значений αz, tпп, а также установление зависимостей αz, tпп от варьируемых параметров VВТЯГ и α, значения которых представлены в табл. 4.1. Получены численные и графические
96
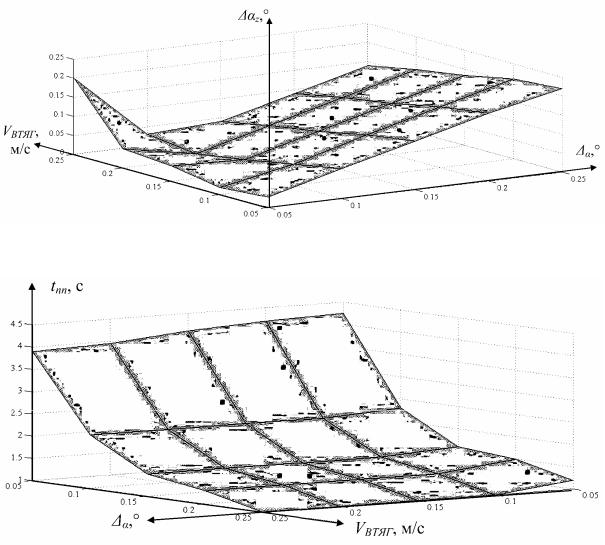
зависимости αz, tпп от VВТЯГ и α (рис. 4.6, 4.7) при величине запаздывания гидропривода системы управления τгп=0,1 с.
Для нахождения целевых функций и решения задач оптимизации была проведена аппроксимация целевых функций αz = f(VВТЯГ; α) и
tпп = f(VВТЯГ; α) уравнением регрессии. Было принято решение об аппроксимации зависимостей методом наименьших квадратов [16].
Рис. 4.6. График зависимости αz от VВТЯГ и α
Рис. 4.7. График зависимости tпп от VВТЯГ и α
Согласно этому методу, наилучшими параметрами а1, а2, …, аm в аналитической зависимости считаются те, для которых сумма квадратов разности отклонения численных и теоретических данных минимальна [16]:
n |
2 |
|
|
f xi, yi , a1, a2,..., am |
|
|
|
F(a1, a2,..., am) zi |
min. |
(4.2) |
i 1
97

В силу необходимости условия экстремума функции многих переменных частные производные этой функции по варьируемым параметрам обращаются в ноль:
|
F(a1, a2,..., am) |
0; |
F(a1, a2,..., am) |
0; |
......... |
F(a1, a2,..., am) |
0.(4.3) |
|
|
||||||||
|
|
|
||||||
|
a1 |
a2 |
|
am |
||||
Частные производные функции F(a1, a2,..., am) по варьируемым параметрам [16]:
F(a1, a2,..., am) |
|
n |
|
|
2 zi f xi, yi, a1, a2,..., am fai xi, yi, a1, a2,..., am . (4.4) |
||
ai |
|||
i 1 |
|||
По остальным параметрам а2, а3,…, аm частные производные имеют аналогичный вид [6]:
n |
f xi, yi, |
a1, a2 |
,..., am fa1 xi, yi, |
a1, a2,..., am |
0; |
|
zi |
||||||
i 1 |
|
|
|
|
|
|
|
. . . . |
. . . . . . . . . . |
|
. . . . |
(4.5) |
|
. . |
|
|||||
n |
f xi, yi, |
|
|
|
a1, a2,..., am 0. |
|
|
a1, a2 |
, |
||||
zi |
,..., am fam xi, yi |
|||||
i 1 |
|
|
|
|
|
|
Решение этой системы относительно а1, а2,…, аm дало искомые наилучшие значения числовых параметров.
Достоверность регрессионных зависимостей оценивается коэффициентом детерминации R2, который вычисляется по формуле [16]
R |
2 |
1 |
i zi |
fi |
2 |
, |
(4.6) |
|||
|
i |
zi |
|
z |
2 |
|||||
|
|
|
|
|
||||||
где zi – эмпирические данные; fi – соответствующие им значения уравнения регрессии; z – среднее значение выборки.
Принято считать, что при R2 ≥ 0,7 имеется высокая степень связи найденного уравнения регрессии с эмпирическими данными. Данное условие выбрано для проверки достоверности аппроксимации.
Программный комплекс MATLAB позволяет находить уравнения регрессии для функциональной зависимости вида z = f(x;y) вышеописанным методом при помощи встроенного пакетаSurface Fitting Toolbox
98
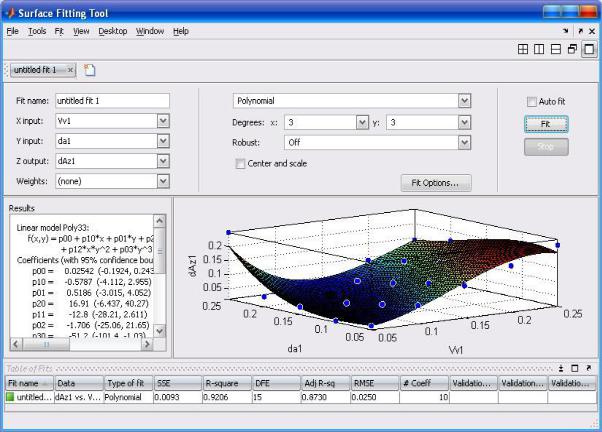
(рис. 4.8), представляющего собой оконный интерфейс с возможностью интерактивного выбора данных, методов и дополнительных настроек аппроксимации [4].
Рис. 4.8. Внешний вид окна инструмента «Surface Fitting»
Для аппроксимации необходимо задать в рабочей области MATLAB массивы входных и выходных переменных. Затем посредством специальной команды (sftool) запустить инструмент «Surface Fitting». Результат аппроксимации выводится в рабочем окне инструмента в виде функции и массива значений коэффициентов регрессии, а также оценки достоверности найденной зависимости. В данной работе, исходя из коэффициента R2 принято решение об аппроксимации численных зависимостей αz от VВТЯГ и α полиномом 3-й степени, в общем случае описываемым уравнением [14]
αz (VВТЯГ; α) = p00 + p10∙ VВТЯГ + p01∙ α + p20∙ VВТЯГ |
2 + p11∙VВТЯГ ∙ α + |
||||
+ p02∙ α |
2 + p30∙ VВТЯГ |
3 + p21∙ VВТЯГ2∙ α + p12∙ VВТЯГ ∙ α |
2 + p03∙ α |
3, (4.7) |
|
где pij – коэффициенты уравнения регрессии; i – степень аргумента VВТЯГ; j – степень аргумента α.
99