Материал: 2330
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
Ризг – сила сопротивления срезаемой стружки изгибу, Н;
Рсдв – сила сопротивления грунта сдвигу по боковым поверхностям, Н;
Кдин – коэффициент динамичности резания.
В процессе резания происходит смятие грунта поверхностями затупления режущей кромки. Для упрощения расчетов допустим, что затупление кромки происходит по дуге, аппроксимированной двумя линейными функциями (Рисунок 2).
Рис. 2. Смятие грунта режущей кромкой
Тогда сила сопротивления грунта сжатию режущей кромкой
Рсж = σсж ∙ |
δ |
∙ L ∙ (sin α0 |
+ |
|
sin α0 |
|
|||
+ cos α0 ∙ μ) ∙ cos γ , |
(5) |
|||
где σсж – предельное напряжение сжатия грунта, Па; δ – толщина затупления кромки, м;
α0 – угол наклона грани к траектории движения резца, град.
L – длина режущей кромки, м.
μ – коэффициент трения грунта по стали.
γ – угол установки режущей кромки в плане, град. Для более точного расчета можно произвести
линеаризацию истинной формы затупления кромки несколькими отрезками.
В процессе резания возникает трение грунта по поверхности износа режущей кромки. Допустим, что давление на площадку износа будет равным напряжению смятия грунта. Тогда сила трения
грунта по поверхности износа режущей кромки |
(6) |
Ризн = σсж ∙ δизн ∙ L ∙ μ , |
где δизн – ширина поверхности износа, м. После срезания стружки с массива грунта ре-
жущей кромкой она продвигается вверх по ножу, при этом происходит изгиб стружки (Рисунок 3).
Рис. 3. Изгиб стружки грунта
Момент силы сопротивления изгибу стружки грунта
Мсопр изг = W ∙ σизг , |
(7) |
где W – момент сопротивления поперечного сечения стружки, м3; σизг – предельное напряжение грунта при изгибе, Па.
Изгиб стружки происходит аналогично изгибу консольной балки. Тогда изгибающий момент от действия силы сжатия грунта
Мизг = |
σсж ∙ L ∙ L2сж |
, |
(8) |
|
2 |
||||
|
|
|
где Lсж – длина площадки, на которой происходит сжатие грунта, м.
Минимальное условие, при котором произойдет изгиб стружки грунта
Мсопр изг = Мизг ; |
(9) |
Исходя из этого условия длина площадки сжатия грунта, достаточная для изгиба срезаемой стружки
Lсж = |
2 ∙ W ∙ σизг |
. |
(10) |
L ∙ σсж |
Таким образом, сила сопротивления срезаемой стружки изгибу
Ризг = 2 ∙ W ∙ L ∙ σсж ∙ σизг ∙ (sin α + |
(11) |
+ cos α ∙ μ) ∙ cos γ , |
где α – угол резания, град.
Для практических расчетов можно допустить, что прочность грунта на изгиб равна его прочности на растяжение [6].
При отсутствии на рабочем органе боковых подрезающих профилей, в процессе резания происходит сдвиг грунта по боковой поверхности. С некоторым приближением можно допустить, что сдвиг по боковой поверхности стружки грунта происходит по площади ее изгиба (Рисунок 4).
Рис. 4. Площадь сдвига грунта
Исходя из этого, площадь сдвига грунта по боковой поверхности
S = h ∙ Lсж , |
(12) |
где h – толщина срезаемой стружки возле боковой поверхности, м.
Таким образом, сила сопротивления грунта сдвигу по боковым поверхностям с учетом действия бокового давления грунта
6 |
Вестник СибАДИ, выпуск 4 (22), 2011 |
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
Рсдв = h ∙ |
2 ∙ W ∙ σизг ∙ (σсж ∙ ξ ∙ μ2 + σр) ∙ |
|
L ∙ σсж |
|
(sin α + cos α ∙ μ) ∙ nбл . |
где Lзаб – длина груди забоя, м;
(13)mгр – масса транспортируемого грунта в конце пути копания, кг;
где ξ – коэффициент бокового давления; μ2 – коэффициент трения грунта по грунту;
σр – предельное напряжение растяжения грунта, Па.
На силу сопротивления копанию грунта влияет скорость резания [5]. Расчетный коэффициент динамичности резания
Кдин = 1 + |
υ2р |
, |
(14) |
|
υ |
2 |
|||
|
д |
|
|
|
где υр – скорость резания грунта, м/с; υд – скорость распространения общей упругопластической деформации грунта, м/с.
При производстве работ по подкапыванию трубопроводов с помощью цепного рабочего органа изменяется положение скребков относительно направления действия силы тяжести. Однако экскаваторы непрерывного действия срезают стружку малой толщины и силы сопротивления грунта при ее отделении возникают в небольшом объеме. Поэтому можно допустить, что влияние силы тяжести на силу сопротивления грунта резанию незначительно.
Таким образом,
δ
Ррез = [σсж ∙ sin α0
+ σсж ∙ δизн ∙ L ∙ μ + (
 2 ∙ W ∙ L ∙ σсж ∙ σизг ∙ cos γ +
2 ∙ W ∙ L ∙ σсж ∙ σизг ∙ cos γ +
+ h ∙ |
2 ∙ W ∙ σизг ∙ (σсж ∙ ξ ∙ μ2 + σр) ∙ nбл) ∙ |
|
L ∙ σсж |
2
(sin α + cos α ∙ μ) ] ∙ 1 + υ2р . (15) υ д
Аналогичным образом, можно определить нормальную составляющую силы сопротивления грунта резанию.
При работе цепного рабочего органа по схеме подкапывания трубопровода действие силы тяжести приводит к обрушению отделенной от массива грунта стружки на боковые поверхности скребка. Поэтому сила тяжести не препятствует продвижению стружки вдоль режущего элемента и не вызывает значительного трения грунта по поверхности скребка (Рисунок 5).
Исходя из этого, силу сопротивления перемещению грунта по поверхности скребка в данном случае практически можно не учитывать.
При транспортировании разработанного грунта в процессе копания, происходит изменение скорости его движения. С некоторым приближением можно допустить, что работа, совершаемая при изменении скорости разработанного грунта одним резцом равна энергии, которой обладает транспортируемый грунт в конце пути копания.
А = Е ; |
|
(16) |
||
|
|
|
||
РИН ГР ∙ Lзаб = |
mгр ∙ υр2 |
, |
(17) |
|
2 |
||||
|
|
|
||
Рис. 5. Обрушение срезаемой стружки
Исходя из этого условия, сила сопротивления изменению скорости движения разработанного грунта
РИН ГР = |
mгр ∙ υр2 |
(18) |
. |
||
|
2 ∙ Lзаб |
|
Так как у экскаваторов непрерывного действия рабочие органы уравновешены, то сила сопротивления перемещению рабочего органа с грунтом будет возникать только в результате подъема грунта. Однако при производстве работ по подкапыванию трубопроводов цепной рабочий орган располагается горизонтально и подъема грунта не происходит.
Рассмотрим рабочий орган с равномерным распределением резцов разных форм по рабочему органу. Тогда количество резцов i – ой формы одновременно взаимодействующих с грунтом
ni = |
Н |
|
. |
(19) |
|
t ∙ m ∙ sin φ |
|||||
|
|
|
|||
где Н – глубина отрываемой траншеи, м; t – шаг расстановки резцов, м;
Таким образом, суммарная сила сопротивления копанию грунта при производстве работ по подкапыванию трубопроводов
m |
{(Рiрез + Si ∙ ρ ∙ |
υр |
2 |
Н |
|
} , (20) |
|
Ркоп = ∑ |
) ∙ |
|
|||||
t ∙ m ∙ sin φ |
|||||||
i = 1 |
|
2 |
|
|
|||
|
|
|
|
|
|
||
где Рiрез – сила сопротивления грунта резанию скребком i – ой формы, Н.
Si – площадь срезаемой стружки скребком i – ой формы, м2;
ρ – плотность грунта, кг/м3.
При работе цепного рабочего органа по продольной схеме копания возникает сила сопротивления перемещению режущего элемента в результате продвижения стружки грунта по его поверхности.
РГР по РО = Si ∙ ρ ∙ g ∙ |
(21) |
|
[Lн ∙ (sin (φ – α) + cos (φ – α) ∙ μ) ∙ cos α + |
||
|
||
+ Lр ∙ (sin (φ – β) + cos (φ – β) ∙ μ) ∙ cos β] , |
|
|
где Lн – длина ножевой системы, м; |
|
|
Lр – длина поверхности резца, м. |
|
|
g – ускорение свободного падения, м/с2. |
|
Вестник СибАДИ, выпуск 4 (22), 2011 |
7 |
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
β – угол наклона поверхности резца к горизонту, град.
Суммарная сила сопротивления перемещению резцов с грунтом при продольном копании, возникающая в результате подъема грунта из забоя
m |
Н ∙ (Н + t ∙ sin φ) |
|
(22) |
||
Р∑ РО с ГР = ∑ Si ∙ |
∙ ρ ∙ g ∙ sin φ |
||||
2 |
φ |
||||
i = 1 |
2 ∙ m ∙ sin |
|
|
||
|
|
|
|
||
Таким образом, суммарная сила сопротивления копанию грунта при продольном копании
|
|
m |
Н |
|
|
||
Ркоп = |
∑ {Рi ∙ |
|
|
} + |
|||
t ∙ m ∙ sin φ |
|||||||
|
|
i = 1 |
|
|
|
||
m |
Н ∙ (Н + t ∙ sin φ) |
|
|
||||
+ ∑ Si ∙ |
∙ ρ ∙ g ∙ sin φ . |
||||||
|
2 ∙ m ∙ sin2 φ |
|
|||||
i = 1 |
|
|
|
|
(23) |
||
|
|
|
|
|
|||
Аналогичным образом можно представить нормальную составляющую силы сопротивления копанию грунта цепным рабочим органом.
Заключение
Предложенные уравнения позволяют определять силу сопротивления копанию грунта цепным рабочим органом в зависимости от следующих параметров: физико-механических характеристик грунта; формы срезаемой стружки; параметров режущих элементов; режимов работы оборудования; параметров отрываемой траншеи; схемы копания (при производстве работ по подкапыванию трубопроводов и откапыванию траншеи).
Библиографический список
1.Демиденко А.И., Семкин Д.С. Сменное рабочее оборудование одноковшового экскаватора для подкопа трубопроводов./ Механизация строительства. М.: ООО «Издательство «Креативная эконо-
мика», №4 2011, 32 с. С. 10-13.
2.Патент РФ № 90461, МПК Е 02 F 3/08. Цеп-
ной экскаватор./ Демиденко А.И., Семкин Д.С.; Си-
бАДИ. 10.01.2010.
УДК 629.7
3.Федоров Д.И. Рабочие органы землеройных машин. М.: Машиностроение, 1990, 358 с.
4.Баловнев В.И. Моделирование процессов взаимодействия со средой рабочих органов дорожностроительных машин. М.: Высшая школа, 1981, 335 с.
5.Фомичев В.П. Методика расчета оптимальных режимов работы траншейных экскаваторов.
Ростов-на-Дону: Ростовский инженерностроительный институт, 1971, 118 с.
6. Писаренко Г.С. и др. Сопротивление материалов. -5-е изд., перераб. и доп. – К.: Вища шк. Головное изд-во, 1986, 735 с.
MATHEMATICAL MODEL OF INTERACTION OF CHAIN WORKING BODY WITH A GROUND
A.I. Demidenko, D.S. Semkin
Interaction of chain working body with a ground is analyzed. The equations for calculation of components of resistance to cutting and digging of a ground by cutters, and also the equation of total resistance to digging of a ground by working body a trench dredge is given.
Демиденко Анатолий Иванович – канд. техн. наук., проф., зав. каф. «Техника для строительства и сервиса нефтегазовых комплексов и инфраструктур» факультета «Нефтегазовая и строительная техника» Сибирской государственной автомобильно-дорожной академии.
Семкин Дмитрий Сергеевич - аспирант каф. «Техника для строительства и сервиса нефтегазовых комплексов и инфраструктур» факультета «Нефтегазовая и строительная техника» Сибирской государственной автомобильнодорожной академии.
E-mail: D.S.Semkin@yandex.ru
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОПТИМИЗАЦИИ МАССОВОЙ И ОБЪЕМНОЙ ХАРАКТЕРИСТИК ЭЛЕМЕНТОВ ПРИВОДА СИСТЕМЫ УПРАВЛЕНИЯ АЭРОСТАТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА
В.В. Сыркин, В.А. Трейер
Аннотация. Обоснована необходимость оптимизации массовых и объемных характеристик системы управления дирижабля. Приведена оптимизация указанных характеристик для напорного трубопровода гидропривода системы управления дирижабля за счет повышения давления в гидросистеме.
Ключевые слова: аэростатический летательный аппарат, массовая характеристика, объемная характеристика, давление, расход рабочей жидкости, напорный трубопровод.
8 |
Вестник СибАДИ, выпуск 4 (22), 2011 |
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
Для эффективного использования аэростатического летательного аппарата (АЛА) при транспортировке грузов и пассажиров, необходимо стремиться к снижению массы и объемов его функциональных элементов и систем.
Учитывая насыщенность АЛА гидравлическими системами управления, целесообразно оптимизировать массу и объем гидравлических магистралей.
Основным направлением решения данной задачи является повышение уровня давления гидросистем.
Известны исследования по оценке последствий повышения давлений, в частности [1], определение его оптимального значения по минимальному значению коэффициента недостатков
жению надежности основных агрегатов гидросистем АЛА.
Для напорного трубопровода с рабочей жидкостью составим уравнения силы веса, имеющего следующие параметры (рисунок 1):
R G 0,2WC 0,3WС 0,3WЦ 0,1Т 0,1h,
где R RP – относительный коэффициент не-
R210
достатков; G – вес гидросистемы; WC, WЦ – объем, занимаемый гидросистемой и силовыми гидроцилиндрами соответственно; Т – установившаяся температура рабочей жидкости; h – ход силовых цилиндров. Значения 1; 0,2; 0,3; 0,1 – относительные весовые коэффициенты значимости соответствующих параметров.
Повышение уровня давления на температуру жидкости оценивают по формуле
t E |
р |
|
1 |
, |
|
|
Cж
где Е – тепловой эквивалент единицы работы; р – рабочее давление; Cж – теплоемкость жидкости; γ – удельный вес жидкости; η – суммарный кпд системы.
Важно оценить влияние давления на объемные кпд насосов, усилия страгивания золотников и др. Так, для кпд насосов
об 1 р qв , qн
где р – давление; qв – объем вредного пространства; qн – объем, вытесняемый поршнем за один рабочий ход; β – коэффициент объемного сжатия жидкости; α – изменение единицы объема вредного пространства насоса при изменении давления на
0,1 МПа.
Для оценки зазоров в сопряженных парах при росте давления используются зависимости [2]:
|
рr1 |
2 |
2 |
|
|
|
рrпл |
|
|||
Ц пл |
|
r1 |
r2 |
|
|
|
1 пл пр, |
||||
E |
|
|
r2 |
Е |
|
||||||
|
r2 |
Ц |
|
||||||||
|
|
Ц |
1 |
2 |
|
|
|
|
пл |
|
|
где δ – суммарное увеличение зазора в паре «втулка-золотник»; δЦ, δпл – изменения размеров гильзы и золотника (плунжера) соответственно; 2r2, 2r1 – наружный и внутренний диаметр гильзы; 2rпл
– диаметр плунжера; σЦ, σпл – коэффициенты Пуассона материалов гильзы и плунжера; ЕЦ, Епл – модули упругости материалов гильзы и плунжера.
Инженерный опыт показал, что рост рабочего давления при проведении конструктивнотехнологических мероприятий не приводит к сни-
Рис.1. Расчетная схема напорного трубопровода
α, δ, lн – внутренний диаметр, толщина стенок и длина трубопровода;
в – допустимый предел прочности (σв
n
–действующее напряжение, n – запас прочности);
р– рабочее давление;
р– потери давления;
р Qн – относительные потери давления в
р
напорном трубопроводе; γм, γж – удельные веса материалов трубопро-
вода и жидкости; λ – коэффициент сопротивления трению;
V – скорость течения жидкости;
Q VF – расход жидкости в трубопроводе с
площадью поперечного сечения F;
N – потребляемая мощность на выходе. Прочность трубопровода
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
1 ; |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
d |
|
|
|
|
|
2p |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
вес трубопровода с жидкостью |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
d2 |
|
|
|
|
м |
|
||||
G |
|
|
G G |
|
|
|
l |
1 4 |
|
1 |
|
|
|
; |
|||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
н.тр |
|
тр |
|
|
|
ж |
|
4 |
|
ж |
d |
d |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ж |
||||||||
потери давления в трубопроводе |
|
|
|
|
|
|
|
||||||||||||||||
|
Q |
н |
р |
|
l V 2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ж |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
d 2q |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где 0,3164R 0,25 (турбулентный режим); Скорость жидкости в трубопроводе
V 4Q ;
d2
передаваемой мощности
N 1 Qн рQ.
На основании данных уравнений можно получить
Вестник СибАДИ, выпуск 4 (22), 2011 |
9 |
ТРАНСПОРТ. ТРАНСПОРТНЫЕ И ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ
|
|
|
|
|
|
|
|
1,421 0,1054 |
|
|
|
|
2р |
|
|
|
|
|
|
|||||||||||
Gн.тр |
АGн.тр |
|
ж |
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|||||||||||||
|
|
|
1,158 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
2р ж |
|||||||||||||
|
|
|
|
|
|
|
0,3164 |
0,4210 |
|
0,2632 |
|
0,7368 |
|
0,4210 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где |
|
|
|
|
|
|
2q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
АGн.тр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
||||||||
|
|
|
|
20,5262 1 Qн 0,7368 Qн |
0,4210 |
|
|
|
|
|||||||||||||||||||||
Для объема трубопровода с жидкостью |
|
|
|
|
|
|
||||||||||||||||||||||||
W |
|
|
|
|
d 2 2l |
|
A |
|
|
ж0,4210 0,1054 |
|
|
|
, |
||||||||||||||||
|
|
|
|
|
|
|
|
р1,158 |
|
|
|
|
||||||||||||||||||
|
н.тр |
4 |
|
|
|
|
|
|
|
н |
|
|
Wн.тр |
|
|
|
|
|
|
|
2р |
|||||||||
где АW |
АG |
н.тр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
н.тр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Объемный вес в зависимости от температуры и давления можно оценить следующим образом
|
|
|
0 |
|
1 |
|
|
|
|
0 |
1 t, |
|
C 15 |
|
p |
0 |
p , |
|
E |
|||||||
|
|
|
|
|
|
где γ0 – объемный вес при t = 150С и р = 0,1 МПа;
Е Ар В – изотермический модуль упругости.
Динамическая вязкость
0е а р р0 t t0 ,
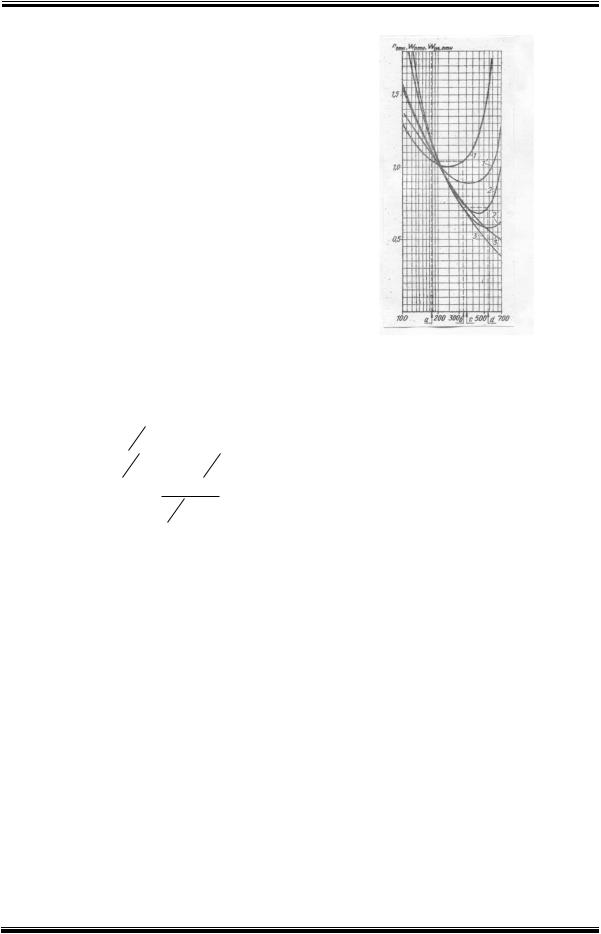
Рис. 2. Зависимости Gотн(р), Wотн(р), Wуд.отн(р) для напорного трубопровода из стали и титана
где а и λ – термический и пьезотермический коэффициент вязкости.
Удельный объем трубопровода
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
м |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
WG |
|
|
|
ж |
|
|
|
р 2кр |
|
р |
|
2 |
|
|
|
гд |
||||||||||
|
|
|
0 |
|
|
0 |
|
|
|
|
|
0 |
|
|
ж |
||||||||||||||
Wуд.отн |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
, |
|||||
|
W G |
|
|
ж |
|
|
|
|
2кр |
|
|
м |
|
|
|
|
|
||||||||||||
|
|
|
|
0 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2к |
р |
|
ж |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
р0 |
|
|
|
|
|
|
|
|
|
|
|
е к |
р |
|
|
|
. |
На рисунке 2 приведены графики для |
|||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
р0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
стальных и титановых трубопроводов. Для стальных трубопроводов минимальный вес достигается при 18
– 30 МПа, для титановых – при 35 – 54 МПа. Приведенные зависимости обусловлены тем,
что при определенной мощности на выходе и постоянных относительных потерях, увеличение рабочего давления вызывает непрерывное уменьшение необходимого расхода (диаметра трубопровода, веса и объема жидкости в нем). Начиная с некоторого давления, происходит рост толщины стенок трубопровода δ, т.е. веса и объема (по условиям прочности). Действие указанных факторов обуславливает наличие минимума в зависимостях
Gотн f p и Wотн f p . Применение титановых сплавов из-за их высокой удельной прочности снижает предельные значения веса на 11% и объема 9%.
На графике (рисунок 2) 1, 2, 3 – Gотн, Wотн, Wуд.отн для стального трубопровода; 1', 2', 3' – Gотн, Wотн, Wуд.отн для титанового трубопровода; а – в, с – d – пятипроцентные зоны проигрыша в весе [3].
Библиографический список
1. Cooke C.H. Product Engineering, №5, May,
1956.
2. Распределительные и регулирующие устройства гидросистем. М.: Машиностроение, 1965,
183с.
3.Расчет и испытание гидравлических систем летательных аппаратов. М.: Машиностроение, 1974, 180 с.
OPTIMIZATION OF MASS AND VOLUME CHARACTERISTICS OF THE DISCHARGE PIPE OF A HYDRAULIC SYSTEM CONTROL AEROSTATIC AIRCRAFT (BLIMP)
V.V. Syrkin, V.A. Treier
The necessity of optimization of optimizing the mass and volume characteristics of the blimp’s control system. It is made optimization of these characteristics for the discharge pipe of a hydraulic system controls the airship by increasing the pressure in the hydraulic system.
Сыркин Владимир Васильевич – доктор технических наук, доцент, заведующий кафедрой кафедра «Прикладная механика» СибАДИ. Основные направления научной деятельности: машиноведение, системы приводов и детали машин. Общее количество опубликованных работ: 97.
Трейер Виктор Артурович - старший преподаватель кафедры кафедра «Прикладная механика» СибАДИ. Основные направления научной деятельности: машиноведение, системы приводов и детали машин. Общее количество опубликованных работ: 5.
10 |
Вестник СибАДИ, выпуск 4 (22), 2011 |