Материал: 2261
|
|
|
Н |
|
|
|
|
xст |
|
|
|
xст |
|
|
|
|
|||||
|
|
|
С |
|
|
|
|
|
|
|
|
|
A. |
(55) |
|||||||
|
1 |
m |
2 |
|
|
|
|
|
|
|
|
2 |
|
||||||||
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|||||||||
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
с |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
Введём обозначение |
2 |
||
. |
02
Сучётом нового обозначения уравнение (55) можно записать в
виде:
А xст,
где коэффициент динамичности.
Коэффициент динамичности показывает во сколько раз амплитуда установившихся вынужденных колебаний А больше статическо-
H
го перемещения xcт C . вызванного статически приложенной си-
лой Н.
|
А |
. |
(56) |
|
|||
|
xст |
|
|
Для случая, когда сила H не зависит от угловой частоты , за-
висимость коэффициента динамичности от отношения частот
0
можно представить в виде графика, который называется “резонансная кривая’’ (рис. 10).
Как видно из резонансной кривой, представленной на рис. 11, с возрастанием частоты возмущающей силы от нуля коэффициент
динамичности увеличивается и при 1, стремится к бесконечно-
0
- 30 -
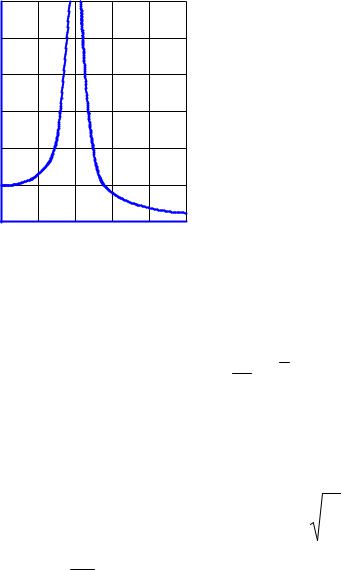
сти , а, следовательно, и амплитуда колебаний стремится к бесконечности.
m |
|
|
m=A/ Xст |
|
|
|
|
|
|
|
|
5.0 |
|
|
|
|
|
4.0 |
|
|
|
|
|
3.0 |
|
|
|
|
|
2.0 |
|
|
|
|
|
1.0 |
|
|
|
|
|
0 |
0.5 |
1.0 |
1.5 |
2.0 |
w/ |
2.5 |
|||||
Рис. 11. Резонансная кривая при отсутствии |
|||||
|
диссипативных сил |
||||
При дальнейшем возрастании частоты коэффициент динамично-
сти постепенно убывает и при соотношении 
 2 становится
2 становится
0
меньше единицы - в этой области динамический эффект вынуждающей силы слабее, чем при её статическом действии. Этим свойством часто пользуются в технике – для уменьшения колебаний объектов под действием гармонических вынуждающих сил, уменьшают жёст-
кость упругих связей, при этом собственная частота |
с |
снижа- |
|
||
0 |
m |
|
|
|
ется, повышается отношение , снижается коэффициент динамич-
0
ности.
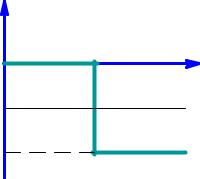
Согласно уравнению (52) при ω < ω0 колебания совпадают по фазе с вынуждающей силой, а когда ω > ω0 колебания находятся в противофазе с вынуждающей силой.
На рис. 12 изображена фазо-частотная характеристика вынужденных колебаний системы без учёта трения: – угол сдвига фаз между вынуждающей силой и колебаниями системы; частота вынуждающей силы.
- 31 -
g |
|
0 |
w |
Е |
|
-(p/ 2) |
|
-p |
|
Рис. 12. Фазо-частотная характеристика системы |
|
без учёта сил трения |
|
В центробежных вибраторах, а также в машинах с неуравновешенным ротором роль возмущающей силы играет центробежная сила, величина которой зависит от частоты вращения вала. Обозначив
m R D,
(где m – масса вращающегося тела, R – расстояние от центра масс до оси вращения), получим
Н F |
m 2 R D 2. |
(57) |
ц.б. |
|
|
Подставив выражение (57) в уравнение (53), получим
А |
|
|
|
H |
|
|
|
|
Н |
|
|
|
|
|
m 2R |
|
|
|
|
mR |
|
|
|
|
|
D |
|
|
|
. |
|||
m |
|
|
|
2 |
|
m |
|
2 |
|
|
m |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
2 |
|
|
|
2 |
|
|
|
2 |
|
|
m |
|
2 |
|
|
|
m |
|
2 |
|
|
|
|||||||||
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
1 |
|
0 |
|
|
|
1 |
|
0 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
А |
D |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
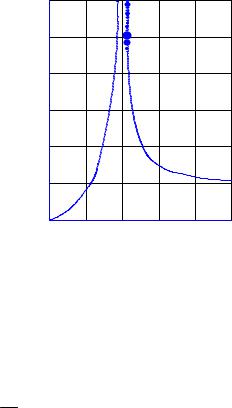
представлена на рис. 13. |
||
Резонансная кривая |
m |
|
|
2 |
|
||||
|
|
|
|
1 |
|
0 |
|
|
|
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
||
- 32 -
A/ (D/ m) |
|
|
|
|
5.0 |
|
|
|
|
4.0 |
|
|
|
|
3.0 |
|
|
|
|
2.0 |
|
|
|
|
1.0 |
|
|
|
|
0 |
0.5 |
1.0 |
1.5 2.0 2.5 |
w/ |
Рис.13 Резонансная кривая |
|
|||
при центробежном возбуждении колебаний
При неограниченном возрастании частоты возмущающего воздействия , амплитуда колебаний стремится не к нулю, как на
рис. 11, а к значению D. m
1.10. Вынужденные колебания диссипативной системы (с учётом трения)
Влияние трения на вынужденные колебания, происходящие вдали от резонансных режимов, обычно невелико и в практических расчётах им чаще всего пренебрегают. Однако, вблизи резонанса учёт трения становится необходимым – без этого ошибки в определении амплитуды вынужденных колебаний становятся недопустимо большими.
1.10.1.Вынужденные колебания диссипативной системы
слинейным трением при действии гармонической вынуждающей силы
Уравнение вынужденных колебаний диссипативной системы можно получить из уравнения (33), дополнив его правую часть выражением для вынуждающей силы. В случае гармонической вынуждающей силы уравнение вынужденных колебаний принимает вид:
- 33 -
mx bx cx H sin t. |
(58) |
Разделив обе части уравнения на массу, получим:
|
|
x |
|
|
b |
|
x |
c |
x |
H |
|
sin t. |
|
|||
|
|
m |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
m |
|
m |
|
|||||
Обозначив, |
b |
2h, |
|
|
с |
|
0 |
2 , получим: |
|
|||||||
|
|
m |
|
|
||||||||||||
|
|
|
|
|||||||||||||
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
х 2hx 0 |
2x |
H |
sin t, |
(59) |
|||||||||
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
где H – амплитуда вынуждающей силы, h – коэффициент демпфирования, 0 угловая частота собственных колебаний системы, угловая частота колебаний вынуждающей силы.
Полагая, h 0, запишем общий интеграл уравнения (59).
|
|
|
|
x е ht(c |
sin t c |
2 |
cos |
|
t ) |
|
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
H |
|
|
|
sin( t ), |
(60) |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
m ( 02 2 )2 4h2 2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||
где |
|
|
2 |
h2 |
|
частота затухающих колебаний системы, |
|
||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
угол, характеризующий отставание фазы перемещения от фазы вынуждающей силы.
2h tg 02 2 ,
где угловая частота вынуждающей силы.
Первая часть решения дифференциального уравнения (60) представляет собой колебания с частотой , которые с течением времени затухают и становятся пренебрежимо малыми.
- 34 -