Материал: 2261
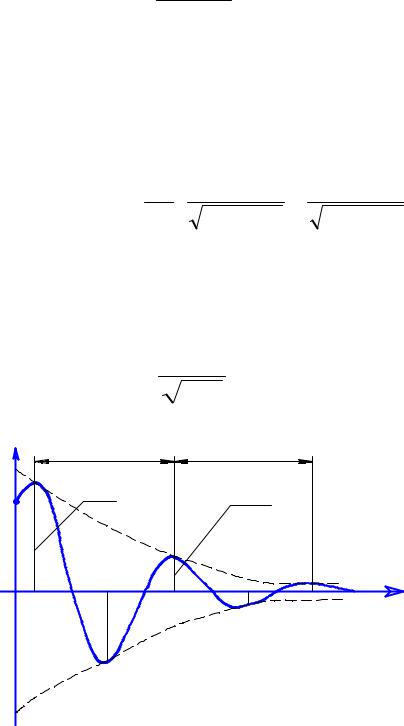
При затухающих колебаниях отношение двух последовательных |
||||||||
максимальных отклонений А(t ) |
и A(t T ) является постоянной ве- |
|||||||
личиной, равной еhT . |
|
|
|
|
|
|
|
|
|
|
|
A(t ) |
ehT . |
|
|
|
(40) |
|
|
A(t T ) |
|
|
|
|
||
Натуральный логарифм этого выражения называется логариф- |
||||||||
мическим декрементом затухания: |
|
|
|
|
|
|||
|
|
lnehТ hT ; |
|
|
|
(41) |
||
|
|
|
|
|
|
|
|
|
|
h Т |
b |
|
4 m |
|
2 b |
. |
(42) |
|
|
2m 4mc b2 |
|
4mc b2 |
|
|||
Малые величины, возведённые в квадрат, становятся ещё мень- |
||||||||
ше, поэтому для приближённых расчётов величиной b2 |
в знаменателе |
|||||||
выражения (42) можно пренебречь. Получим: |
|
|
|
|
||||
|
|
|
b . |
|
|
|
(43) |
|
|
|
|
mc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ao |
T |
|
|
T |
|
|
|
|
A(t) |
|
|
|
|
|
|
|
|
Xo |
|
|
A(T+t) |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
0 |
|
|
|
|
|
|
|
|
-Ao |
|
|
|
|
|
|
|
|
|
Рис. 9. График затухающих колебаний |
|
|
|||||
- 25 -
На рис. 9 изображён график затухающих колебаний, на котором обозначены амплитуды затухающих колебаний и длительности одного цикла колебаний при докритическом демпфировании.
При закритическом демпфировании коэффициент вязкого трения увеличивается, становятся справедливыми неравенства
h 0; |
(44) |
||
b 2 |
|
|
|
mc. |
(45) |
||
В этом случае общее решение дифференциального уравнения движения системы
mx bx cx 0
запишется в виде:
x c1еs1 t |
c2 |
es2t , |
(46) |
где |
s |
|
b |
b2 4mс |
. |
|
|
||||
|
1,2 |
|
|
2m |
|
|
|
|
|
|
Постоянные интегрирования определяются через начальные условия выражениями:
С1 s2 x0 x0 ;
s1 s2
C2 s1 x0 x0 . s2 s1
Движение, описываемое выражением (46) является апериодиче-
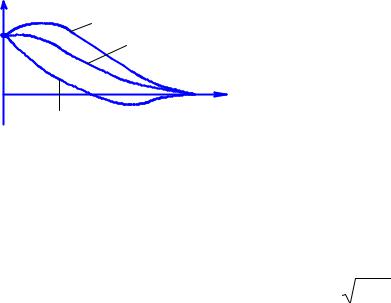
ским (неколебательным). При любых начальных условиях x0 и x0 переменная X асимптотически стремится к нулю.
- 26 -
X |
. |
|
Xo |
Xo>0 . |
|
Xo=0 |
||
|
||
0 |
t |
|
. |
||
|
||
|
Xo<0 |
Рис. 10. Графики апериодических колебаний системы
при различных начальных условиях
Рассмотрим третий случай, когда h 0 |
(b 2 mc). |
Решение дифференциального уравнения (33) в этом случае имеет вид:
x е h (t) (c c |
2 |
t), |
(47) |
1 |
|
где с1 х0 |
,с2 x0 h x0 |
. |
Это решение по характеру не отличается от решений, проиллюстрированных на рис. 10.
Таким образом, это движение также носит апериодический (неколебательный) характер.
Вывод: свободное движение диссипативной системы является колебательным при h 0 (коэффициент затухания меньше собственной угловой частоты), и апериодическим (неколебательным) при h 0 .
1.9.Вынужденные колебания системы
содной степенью свободы при отсутствии трения
Уравнение свободных колебаний с учётом трения имеет вид:
mx bx cx 0.
Уравнение свободных колебаний без учёта трения (при b 0):
- 27 -
mx cx 0.
Уравнение вынужденных колебаний отличается от уравнения свободных колебаний тем, что появляется правая часть дифференциального уравнения, которая описывает внешние возмущающие воздействия, действующие на систему (вынуждающую силу). Если вынуждающая сила описывается функцией F H sin t, то уравнение вынужденных колебаний системы с одной степенью свободы при отсутствии трения принимает вид:
mx cx H sin t. |
(48) |
Разделим обе части уравнения (48) на массу (коэффициент при x ).
x |
c |
x |
H |
sin t. |
(49) |
m |
|
||||
|
|
m |
|
||
Обозначив |
c |
0 |
2 , получим: |
|
|||
|
m |
|
|
x |
2 |
|
H |
sin t. |
(50) |
0 |
|
||||
|
|
m |
|
||
В уравнении (50) 0 собственная угловая частота, угловая частота вынуждающей силы, H – амплитуда вынуждающей силы. Решение этого дифференциального уравнения при 0 и нулевых
начальных условиях (x0 0, x0 0) имеет вид:
x |
|
H |
(sin t |
|
sin t ). |
(51) |
|
|
|
|
|
||||
|
m( 0 |
2 2 ) |
|
0 |
|
||
|
|
0 |
|
||||
Полученное решение представляет разность двух гармонических колебаний с различными частотами ( и 0 ). В действительности этот процесс можно наблюдать лишь в самом начале, т.к. колебания с собственной частотой 0 постепенно затухают.
- 28 -

Таким образом, наиболее существенная стационарная часть процесса (установившиеся вынужденные колебания) описываются выражением:
x |
|
H |
|
sin t. |
(52) |
|
m( 0 |
2 2 |
) |
||||
|
|
|
Амплитуда этих колебаний, происходящих с частотой , определяется уравнением:
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
||||||
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
(53) |
||||||
m |
|
0 |
2 |
2 |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
В выражении (53) введём обозначение 0 |
2 |
|
с |
. |
|||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
А |
|
|
|
H |
|
|
|
|
|
H |
|
|
|
. |
(54) |
||||||||||
m |
|
|
с |
2 |
|
|
|
|
c m 2 |
|
|
||||||||||||||
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
В выражении (54) H – это амплитуда возмущающей силы, а ве-
личина с m 2 называется эффективной жёсткостью системы при
гармоническом возбуждении колебаний.
Таким образом, амплитуда вынужденных колебаний равна амплитуде возмущающей силы, деленной на эффективную жёсткость системы.
Введём понятие |
H |
xcт |
статическая деформация системы |
|
|||
|
C |
|
|
под действием статически приложенной силы Н.
Разделим числитель и знаменатель выражения (54) на жёсткость С.
- 29 -