Материал: 2261
У математического маятника вся масса сосредоточена в одной точке – центре тяжести. Поэтому момент инерции математического маятника легко вычислить:
Iм m l2. |
(29) |
Подставляя выражение (29) в уравнения (26), (27), (28), получим для математического маятника:
|
|
|
|
|
|
|
mgl |
|
|
|
g |
(30) |
|||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|||||||||||
|
|
|
ml2 |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
||||||||||||
|
|
|
0 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
f |
0 |
|
|
|
|
|
|
|
g |
; |
|
|
(31) |
||||||||||||
2 |
|
2 |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
l |
|
||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Т |
0 |
|
|
2 |
|
|
|
|
|
|
|
l |
. |
(32) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
f0 |
|
|
|
|
|
|
|
|
|
g |
|
||||||||
1.8. Уравнение свободных колебаний линейной диссипативной системы
Диссипативная система – это неконсервативная система, у которой полная механическая энергия при любом движении убывает.
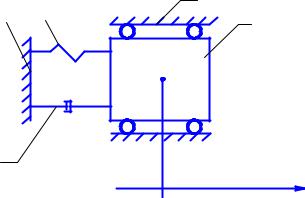
На рис. 7 изображена расчётная схема линейной диссипативной системы с одной степенью свободы. Система не подвергается внешним воздействиям. Поэтому её колебания называют свободными.
Перемещения тела вдоль оси Х отсчитываем от его устойчивого равновесного положения. При движении тела на него действует сила
упругости С с х, и сила вязкого трения В в х .
- 20 -
4 |
2 |
5 |
1 |
||
|
|
с |
|
|
ц.т. т |
|
3 |
d |
|
x |
|
|
|
|
|
|
0 |
Рис. 7. Схема колебательной диссипативной системы: 1 – тело постоянной массы; 2 – линейный упругий элемент (с постоянной упругостью С);
3 – элемент вязкого трения (демпфер)
спостоянным коэффициентом вязкого трения b; 4 – неподвижная стойка; 5 – направляющие.
По второму закону Ньютона:
m x B С,
m x b x c x, m x b x cx 0.
Разделив почленно уравнение (33) на m, получим:
|
|
x |
b |
x |
c |
x 0. |
||||
|
|
|
||||||||
|
|
|
|
|
m |
|
|
m |
||
Обозначив |
b |
2h, |
с |
0 |
2 , |
получим: |
||||
|
|
|||||||||
|
m |
m |
|
|
|
|
||||
x 2h x 02 x 0.
(33)
(34)
(35)
Поскольку система не подвергается внешним воздействиям, правая часть уравнений (33) и (35) равна нулю.
- 21 -
В уравнении (35) коэффициент h b называется коэффици-
2m
ентом затухания или коэффициентом демпфирования. Коэффициент
0 собственная угловая частота колебаний рад/ с,
Определим размерность коэффициента затухания h и сравним её
сразмерностью 0.
Вуравнении (33) каждое слагаемое имеет размерность силы (Н),
м
а в уравнении (35) – размерность ускорения .
с2
Отсюда следует, что
h b ;
2 m
b x H кг м;
с2
b |
кг м |
|
с |
|
кг |
. |
с2 |
|
|
||||
|
|
м с |
||||
Зная размерность коэффициента вязкого трения b, находим размерность коэффициента затухания h:
кг
h |
с |
|
1 |
. |
кг |
|
|||
|
|
с |
||
Сравнивая размерности собственной угловой частоты колебаний 0 и коэффициента затухания h, мы можем сказать, что эти раз-
ные физические величины имеют одинаковую размерность 1. По-
с
этому мы можем сравнивать эти две величины, вычитать и складывать.
Общий интеграл уравнения (35) имеет различный вид в зависимости от соотношений h и 0.
- 22 -
При докритическом демпфировании, когда h< 0, |
(b |
m c ) |
общее решение дифференциального уравнения (35) имеет вид: |
|
|
|
|
|
x е h t (c1 sin t c2 |
cos t), |
(36) |
|||||||||
где h |
b |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
2 h2 , |
|
|
|
|
|
|||
где угловая |
частота затухающих колебаний, собственная |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
угловая частота системы, h – коэффициент затухания. |
|
|||||||||||||
Постоянные С1 и С2 |
определяются из начальных условий: |
|
||||||||||||
при t 0 |
x x |
x x |
, |
|
|
|
|
|
|
|
|
|
||
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
С |
x0 |
h x0 |
,С |
2 |
x |
0 |
. |
|
|||
|
|
|
|
|
|
|||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Другая форма решения дифференциального уравнения (35) имеет вид:
x А е h t sin( t 0 ), |
(37) |
|
где А – начальная амплитуда колебания;
|
|
|
|
(x |
hx )2 |
|
|
2 |
|
(x |
hx )2 |
|
|
2 |
|
|
А С2 |
С2 |
|
x |
|
|
x |
|
. |
||||||||
0 |
|
0 |
0 |
|
0 |
0 |
0 |
|
||||||||
|
|
|
|
|
|
|
||||||||||
1 |
2 |
|
|
|
2 |
|
|
|
0 |
2 h2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
0 начальная фаза колебания.
|
|
x |
0 |
|
|
|
2 |
h2 |
|
|
|
x |
0 |
|
|
2 |
h2 |
||||
tg 0 |
|
|
|
|
|
|
0 |
|
|
, |
0 |
arctg |
|
|
|
0 |
|
|
|
||
|
x |
0 |
|
h x |
0 |
|
x |
h x |
. |
||||||||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
||
Обе формы решения дифференциального уравнения описывают затухающие колебания с постепенно убывающей амплитудой (рис. 8).
- 23 -
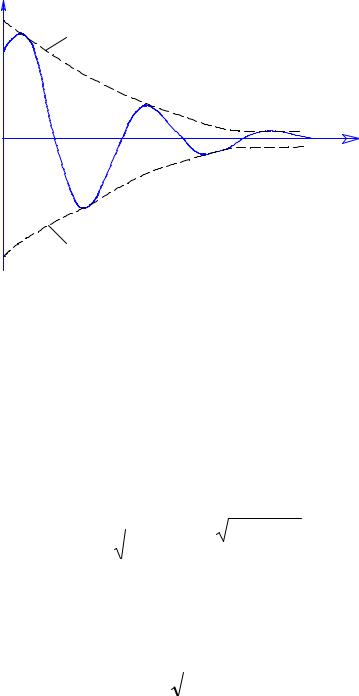
Ao |
A=Ao*е-ht |
Xo |
|
|
t |
0 |
|
-Ao |
A=-Ao*е-ht |
|
Рис. 8. Затухающие колебания |
Огибающие кривой процесса затухания определяются функция-
ми:
А А0 е ht ,
где A0 начальная ордината огибающей.
Угловая частота свободных затухающих колебаний определяется выражением:
|
|
|
|
|
4mс b2 |
. |
|
||||||
|
|
2 h2 |
|
(38) |
|||||||||
|
|
|
|||||||||||
|
0 |
|
|
|
2m |
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
Соответственно длительность одного цикла составляет: |
|
||||||||||||
Т |
|
2 |
|
|
|
4 m |
|
. |
(39) |
||||
|
|
|
|
|
|||||||||
|
|
|
|
||||||||||
|
|
|
4mc b2 |
|
|||||||||
Чаще всего влияние трения на частоту затухающих колебаний пренебрежимо мало, в формуле (38) можно принять h 0.
Таким образом, для практических расчётов можно принять, что угловая частота затухающих колебаний приблизительно равна угловой частоте свободных колебаний системы без трения. Т.е. можно
принять 0 и Т Т0.
- 24 -