Материал: 2261
|
|
х х0 |
cos 0t |
х0 |
|
sin 0t, |
(19) |
|
|
0 |
|||||
|
|
|
|
|
|
||
где x |
и x |
начальное отклонение и начальная скорость системы. |
|||||
0 |
0 |
|
|
|
|
|
|
Уравнение (19) является решением дифференциального уравнения (15). Решение этого дифференциального уравнения можно записать и в другом виде [3]:
|
|
|
|
|
|
|
|
х |
А sin( |
|
0 |
t 0 |
), |
|
|
(20) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
А |
|
|
|
|
|
|
|
|
2 |
( |
х0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
с 2 с |
|
2 |
|
|
|
х |
)2 |
, |
амплитуда |
колебаний, 0 |
||||||||||||||||
2 |
|
|
0 |
|
|
||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|||||||||||||||
начальная фаза колебаний. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
x |
|
|
|
||
|
|
sin |
0 |
|
1 |
; cos |
0 |
|
|
2 |
; |
|
0 |
arctg |
|
|
0 |
. |
|||||||||
|
|
A |
|
||||||||||||||||||||||||
|
|
|
|
|
x |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
0 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
||
Сравнивая уравнения (15) и (20) можно сделать следующие выводы.
При наличии начального отклонения x0 или начальной скорости
х0 система , изображённая на рис. 4 будет совершать незатухающие гармонические колебания с амплитудой А, начальной фазой 0 и угловой частотой 0.
Эти колебания называются свободными или собственными колебаниями.
Параметры этих колебаний определяются только соотношением величин m и С (массы тела и жёсткости пружины): угловая частота
|
с |
; |
линейная частота f |
|
|
1 |
|
c |
; период колебаний |
||||||
|
|
|
|
||||||||||||
0 |
|
|
m |
|
|
|
|
|
0 |
|
2 |
m |
|||
Т |
1 |
|
2 |
|
|
m |
. |
|
|
|
|
|
|
||
f0 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
c |
|
|
|
|
|
|
||||
Из уравнения (20) следует, что начальные условия ( начальное отклонение и начальная скорость) определяют значение амплитуды
- 15 -
колебаний А и начальную фазу колебаний 0 , но не влияют на период колебаний, линейную и угловую частоты колебаний.
Из уравнения (20) следует также, что амплитуда колебаний не влияет на частоту и период колебаний.
Т.е. колебания с большей амплитудой имеют такую же частоту и период, как колебания с меньшей амплитудой при прочих равных условиях.
Колебания, частота которых не зависит от амплитуды, называ-
ются изохронными.
Колебательную систему, описываемую уравнениями (13), (15) и (20) можно назвать консервативной, поскольку диссипативные силы отсутствуют, энергия колебаний не рассеивается, колебания являются незатухающими, продолжаются сколь угодно долго.
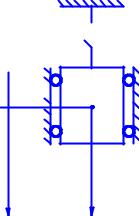
Рассмотрим случай, часто встречающийся на практике, когда на упругий элемент действует постоянная сила, обусловленная, например, весом подпружиненной массы.
 c
c
0  ц.т.
ц.т.
т 
x mg
Рис. 5. Расчетная схема при действии на тело постоянной силы
На рис. 5 изображена расчётная схема рассматриваемой динамической системы.
Уравнение равновесия системы запишем в виде:
mg c xcт, |
(21) |
- 16 - |
|
где xcт статическая деформация пружины под действием веса тела mg.
Уравнение движения системы можно записать в виде:
m x c( x xcт ) mg . |
(22) |
C учётом уравнения (21) можно записать:
m x cx 0.
Поскольку полученное уравнение полностью совпадает с уравнением (13) можно сделать следующий вывод.
Начальная деформация упругого элемента xcт , вызванная действием постоянных внешних сил (например, весом подрессоренной массы) не влияет на характер колебаний системы около положения равновесия. Изменяется только положение равновесия на величину начальной деформации упругого элемента.
Покажем, как, зная только величину статической деформации, можно определить такие характеристики как период, линейную и угловую частоты колебаний.
Из уравнения (21) можно определить значение коэффициента жёсткости упругого элемента.
mg c xcт; |
|
||
c |
mg |
. |
(23) |
|
|||
|
xcт |
|
|
Подставляя выражение (23) в формулы для определения угловой
илинейной частоты, периода колебаний получим:
-17 -

0 |
|
с |
|
|
|
mg |
|
|
|
|
|
g |
; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
m |
xст m |
xст |
||||||||||||||||
|
|
|
0 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
f |
0 |
|
|
|
|
|
|
|
|
g |
; |
|
|
||||||||||
|
2 |
2 |
|
|
|
|
x |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cт |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||||||||||
Т0 |
|
2 |
xcт |
. |
|
|
|||||||||||||||||
|
|
|
|
||||||||||||||||||||
|
|
|
|
f0 |
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|||
Таким образом, измерив величину упругой деформации под действием веса тела, можно рассчитать основные параметры собственных колебаний системы–период, линейную и угловую частотыколебаний.
1.7. Уравнение свободных колебаний маятника. Период собственных колебаний физического маятника, математического маятника
Физический маятник представляет собой |
колебательную |
систему с одной степенью свободы. |
|
O 











l
 y
y


C 
l*siny |
mg |
Рис. 6. Схема колебаний физического маятника: О – ось качания; С – центр тяжести маятника;
l– расстояние от оси качания до центра тяжести маятника;
-18 -

l sin плечо силы веса маятника относительно оси поворота
На рис. 6 изображена расчётная схема колебаний физического маятника. Маятник в процессе колебаний вращается относительно оси качания О, поэтому уравнение движения маятника является уравнением вращательного движения.
I mg l sin 0, |
(24) |
где I момент инерции маятника относительно оси качания, угол отклонения маятника от вертикали, l расстояние от оси подвеса до центра тяжести, m масса маятника Уравнение (24) является нелинейным, однако, для малых углов справедливо соотноше-
ние sin .
Уравнение (24) приобретает вид:
I mg l 0. (25)
Разделив обе части уравнения на I , получим:
|
|
mgl |
0. |
(25а) |
||||||||||||||
|
||||||||||||||||||
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решая дифференциальные уравнения (25) и (25а) аналогично |
||||||||||||||||||
уравнениям (13) и (14) , получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mgl |
; |
|
|
|
|
(26) |
||||||||||
|
|
|
|
|
|
|
||||||||||||
0 |
|
|
|
|
I |
|
||||||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
f0 |
|
|
|
mgl |
; |
(27) |
||||||||||||
2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
I |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Т0 2 |
|
|
|
|
|
|
I |
. |
(28) |
|||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
mgl |
|
||||||||
- 19 -