Материал: 2261
угловой скоростью , при этом вектор виброперемещения отстаёт по
фазе от вектора виброскорости на угол 900( ), а от вектора виброу-
2
скорения на угол 1800( ).
1.4. Классификация колебательных систем. Число степеней свободы системы
Классифицировать колебательные системы можно по различным признакам. Одной из важнейших характеристик колебательной системы является число степеней свободы системы – количество независимых числовых параметров, которые однозначно определяют положение системы в любой момент времени.
Число степеней свободы системы прежде всего зависит от степени идеализации системы. Различают системы с конечным и бесконечным числом степеней свободы. Системы, обладающие бесконечным множеством степеней свободы называют распределёнными (континуальными), системы с конечным (ограниченным) числом степеней свободы – дискретными.
Колебания систем с конечным числом степеней свободы описываются обыкновенными дифференциальными уравнениями.
Колебания распределённых систем описываются дифференциальными уравнениями в частных производных.
Колебательные системы можно разделить на линейные и нели-
нейные.
Для линейных систем справедлив принцип суперпозиции, согласно которому сумма откликов системы на воздействия, прилагаемые порознь, равна отклику системы на те же воздействия, прилагаемые совместно.
Для нелинейных систем принцип суперпозиций неприемлем. Линейные колебательные системы описываются дифференци-
альными уравнениями с постоянными коэффициентами. Нелинейные системы описываются дифференциальными уравнениями, в которых коэффициенты при переменных изменяются при изменении значений переменных.
Различают колебательные системы стационарные и нестацио-
нарные.
- 10 -
Свойства нестационарных колебательных систем изменяются с течением времени, свойства стационарных систем принимаются постоянными в течение определённого времени.
Различаютколебательныесистемыавтономныеинеавтономные. Автономные системы – это такие системы, колебательные про-
цессы в которых могут происходить лишь за счёт внутренних источников энергии, а также за счёт энергии, сообщённой системе в виде начального возмущения.
Все прочие системы называются неавтономными. Различие между автономными и неавтономными системами достаточно условно, поскольку граница, отделяющая систему от окружающей среды, выбирается при формированииматематическоймоделиколебательнойсистемы.
Различают колебательные системы консервативные и неконсервативные. Система называется консервативной, если её полная механическая энергия не изменяется в процессе колебаний. В противном случае система называется неконсервативной.
Среди неконсервативных систем можно выделить диссипативные системы – системы, у которых полная механическая энергия рассеивается за счёт действия диссипативных сил (сил трения).
Различают также автоколебательные системы – системы с самовозбуждением колебаний. Автоколебательные системы характеризуются наличием внешнего источника энергии, которая используется для усиления сигнала, а также положительными обратными связями между выходными и входными сигналами.
1.5. Механические системы. Классификация связей механической системы
Механической системой называется множество материальных точек, в котором движение каждой точки зависит от положения и движения остальных точек системы.
Взаимодействие механической системы с окружающей средой определяется внешними возмущающими воздействиями и связями, налагаемыми на систему.
Связями называются условия, которые налагают ограничения на положение точек системы, а также на скорость их перемещения. Если в уравнения связей входят только координаты точек системы и их производные, (связи не изменяются с течением времени), также связи называются стационарными или склерономными.
- 11 -
Если в уравнения связей входит время в явном виде (связи изменяются со временем) такие связи называют нестационарными или
реономными.
Связь называют геометрической, если она накладывает ограничения только на координаты точек системы (в уравнение геометрической связи не входят векторы скоростей). Если связь накладывает ограничения на скорости точек системы, связь называется кинематиче-
ской или дифференциальной.
Связи называются голономными, если они описываются одними уравнениями при работе на растяжение и сжатие, и неголономными – если разными.
a) |
б) |
в) |
г) |
д) |
е) |
c |
в |
s c |
в c |
в1 c |
в |
|
|
|
|
в2 |
s |
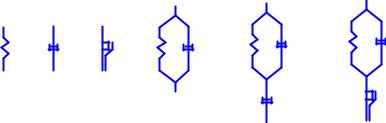
Рис. 3. Элементы связей, налагаемых на систему
На рис. 3 схематично изображены некоторые типовые элементы, обычно используемые для описания связей, накладываемых на меха-
нические системы: a) упругий элемент; б) элемент вязкого трения; в) элемент сухого трения (Сен-Венана); г) упруго-вязкий элемент (Кельвина-Фохта); д) упруго-вязкий элемент с остаточной деформацией; е) упруго-вязкий элемент с элементом сухого трения.
Связь называется идеальной, если работа её реакции на всех возможных перемещениях равна нулю (отсутствуют потери энергии).
1.6. Дифференциальные уравнения свободных колебаний механической системы без учёта трения. Период колебаний.
Понятие о линейной и угловой частотах колебаний
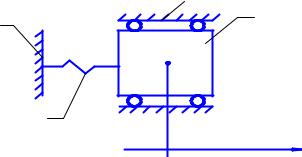
Рассмотрим процесс колебаний одномассовой динамической системы с одной степенью свободы, без учёта сил трения. На рис. 4 изображена схема одномассовой динамической системы с упругим элементом.
- 12 -
4
3 |
1 |
с |
ц.т. т |
2 |
|
0 |
x |
Рис. 4. Схема одномассовой динамической системы: 1 – твёрдое тело с постоянной массой m;
2 – невесомый упругий элемент с коэффициентом жёсткости С;
3 – неподвижная стойка; 4 – направляющие
Ось Х направлена слева направо, параллельно направляющим, в положении равновесия проекция центра тяжести твёрдого тела 1 на ось Х совпадает с началом координат оси Х.
Составим математическую модель колебаний этой динамической системы, приняв следующие допущения: коэффициент жёсткости упругого элемента С постоянен; диссипативные силы (силы трения) отсутствуют; внешние возмущения отсутствуют, действуют только внутренние силы.
В соответствии со вторым законом Ньютона мы можем напи-
сать
m x S, |
(11) |
где х ускорение тела 1; S сила, с которой пружина 2 действует на тело 1.
Сила сжатия пружины S пропорциональна деформации пружины и направлена в сторону противоположную деформации.
S cx, |
(12) |
где х смещение твёрдого тела 1 от положения равновесия. Подставляя уравнение (12) в уравнение (11) получим:
m x сх 0. |
(13) |
- 13 - |
|

|
Разделив каждый член уравнения (13) на массу m получим |
||||||||||
|
|
|
|
|
|
|
|
x |
с |
х 0. |
(14) |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
с |
|
|
m |
|
|
|
Обозначив |
0 |
2 , запишем: |
|
|||||||
|
|
|
|||||||||
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
х 2 x 0, |
(15) |
||
|
|
|
|
|
|
|
|
0 |
|
||
|
|
|
|
|
|
|
|||||
где 0 |
|
с |
собственная угловая частота колебаний системы. |
|
|||||||
|
|
||||||||||
|
|
|
m |
|
|
|
|
|
|
||
Уравнение (15) представляет собой линейное дифференциальное уравнение второго порядка, которое, как известно из курса математики [3], имеет решение в виде общего интеграла:
х с1 cos 0t c2 sin 0t, |
(16) |
где c1 и с2 постоянные интегрирования, которые находятся из на-
чальных условий: при t 0 |
x x , |
x x |
, |
где x |
и x |
на- |
|
0 |
0 |
|
0 |
0 |
|
чальное перемещение (отклонение) и начальная скорость в момент времени t 0.
Продифференцировав уравнение (16) получим: |
|
||
х с1 0 sin 0t c2 |
0 |
cos 0t |
(17) |
Учитывая, что при t 0 cos 0t |
1, |
а sin 0t 0, из уравнения |
|
(16) и (17) найдём выражения для постоянных интегрирования c1 и
с2:
|
|
|
|
с2 |
|
х |
|
|
с |
х |
|
, |
|
0 |
. |
(18) |
|
|
|
|||||||
1 |
|
0 |
|
|
0 |
|||
Подставив полученные выражения для постоянных интегрирования в уравнение (16), получим:
- 14 -