Материал: 2261
Особенностью этой АЧХ является то, что резонанс наступает при частоте вынужденных колебаний рез , большей, чем частота
собственных колебаний 0. Амплитуда вынужденных колебаний при увеличении частоты вращения дебаланса стремится к значению
m0R . m1 m0
1.10.3. Вынужденные колебания диссипативной системы с кинематическим возбуждением колебаний
На рис. 18 представлена расчётная схема с кинематическим возбуждением колебаний.
2 |
5 |
1 |
|
6 |
|
4 |
|
|
с2 |
|
|
c1 |
m |
|
|
f=w*t |
|
|
|
|
|
|
|
в1 |
|
|
в2 |
9 |
8 |
3 |
|
x |
7 |
||
0 |
|
z |
|||
|
|
|
|
|
Рис. 18. Колебательная система с кинематическим возбуждением
Поводок 8 совершает возвратно-поступательное движение под действием кривошипно-шатунного механизма:
z Rk cos t. |
(74) |
где Rk радиус кривошипа.
Дифференциальное уравнение движения тела 1 можно записать в виде:
mx b1 x b2 (x z ) c1 x c2 (x z) 0, (75)
- 40 -
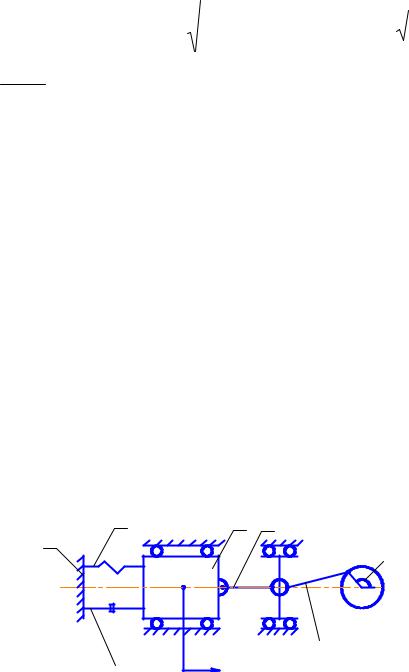
где x – координата тела 1, отсчитываемая от его среднего положения; z – координата поводка.
Уравнение (75) с учётом равенства (74) можно привести к виду
|
|
x 2h x 0 |
2x P cos( t 0 ), |
|
|
|
|
|
|
(76) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b b |
|
|
|
с1 |
с2 |
|
|
|
R |
|
|
|
|
|
|
|
||
|
|
|
; |
|
|
|
2 |
|
2 |
2 |
|
|||||||||
где |
h |
1 2 |
; |
|
|
P |
k |
|
c |
2 |
|
b |
|
|
; |
|||||
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
||||||||||||||||
|
|
2m |
0 |
|
|
m |
|
|
|
m |
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
0 arctgb2 . c2
Сравнивая уравнения (59) и (76) можно заметить, что они отличаются только наличием начальной фазы колебания вынуждающей силы в уравнении (76).
Таким образом, дифференциальное уравнение колебаний при кинематическом возбуждении (76) сводится к такому же виду, как при силовом возбуждении (59), за исключением того, что начальная фаза вынуждающего воздействия при кинематическом возбуждении не равна нулю.
1.10.4. Вынужденные колебания диссипативной системы с принудительным приводом инерционного элемента
Рассмотренные выше системы, совершающие вынужденные колебания являются динамическими. Их движение зависит от сил, действующих на инерционный элемент и от начальных условий. Число степеней свободы динамической системы больше нуля.
2 |
1 |
5 |
4 |
|
f=w*t |
c1 |
m |
|
|
|
|
в1 |
|
6 |
3 |
|
|
x |
|
|
|
0 |
|
Рис. 19. Колебательная система с жёстким приводом
- 41 -

На рис. 19 изображена колебательная система, амплитуда колебаний которой зависит не от частоты возбуждающего воздействия, а от длины кривошипа.
Перемещение такой системы однозначно определяется положением кривошипа, число степеней свободы такой системы равно нулю.
Если длина кривошипа во много раз меньше длины шатуна, то тело 1, совершает гармонические колебания:
x Rk cos t, |
(77) |
где Rk радиус кривошипа.
Согласно принципу Даламбера, сумма всех сил, действующих на тело 1, включая силы инерции, равна нулю.
|
I B S F 0, |
(78) |
где I m x |
сила инерции, B b x |
сила сопротивления |
демпфера, S cx сила сжатия пружины, |
F сила воздействия |
|
штока 5 на тело 1. |
|
|
В итоге получаем дифференциальное уравнение |
||
|
mx bx cx F. |
(79) |
Принимая S=0 при x=0, получим:
F H cos( t 0 ). |
(80) |
Подставляя выражение (77) в решение дифференциального уравнения (61), получим выражение для амплитуды возмущающей силы:
H m R |
|
( |
2 |
2 )2 4h2 2 . |
(81) |
k |
|
|
0 |
|
|
Как следует из этого уравнения, амплитуда усилия в штоке 5 изменяется с изменением частоты возмущающих колебаний, радиуса кривошипа Rk и массы тела m. На амплитуду усилия в штоке влияют
- 42 -
также коэффициент затухания h и собственная угловая частота системы 0.
Исследовав выражение (81) на минимум можно найти резонансную частоту возмущающей силы
рез |
0 |
2 2h2 , |
(82) |
при которой амплитуда усилия в штоке достигает минимума.
Hрез 2m Rk h ( 0 |
2 2h2 ). |
(83) |
При отсутствии диссипативных сопротивлений h=0, и 0 , амплитуда усилия на штоке равна нулю Hрез 0.
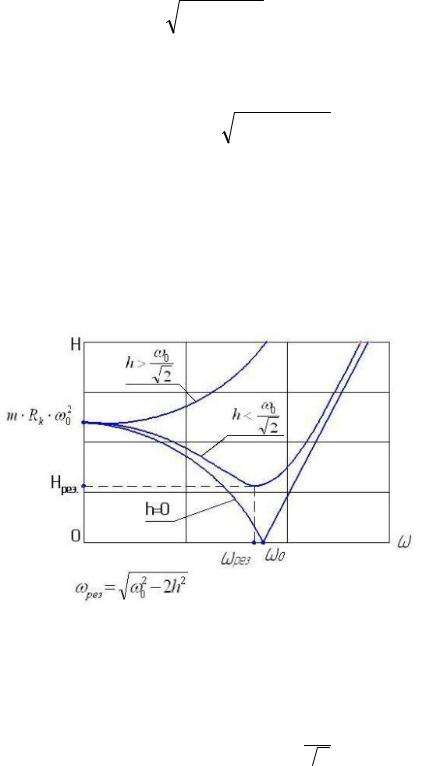
На рис. 20 приведены амплитудно-частотные характеристики (АЧХ) амплитуды усилия в штоке в зависимости от угловой частоты вращения кривошипа (угловой частоты возмущающих воздействий).
Рис. 20. Амплитудно-частотная характеристика системы с жёстким приводом
Из АЧХ, приведённых на рис. 20, можно заметить, что при не-
высоких значения коэффициента затухания h 0 амплитуда усилия
 2
2
- 43 -

на штоке H уменьшается с ростом частоты возмущающего воздействия и, достигнув минимума Hрез (при рез ), начинает увеличиваться при дальнейшем увеличении частоты возмущающего воздействия .
Таким образом, резонанс в данной системе проявляет себя снижением усилия в приводе.
При частоте возмущающего воздействия близкой к нулю ам-
плитуда усилия на штоке H равна значению m Rk 02. При отсутствии диссипативных сил (h=0), при приближении частоты возмущающего воздействия к собственной частоте колебаний системы 0
( ) амплитуда усилия на штоке H стремится к нулю.
0
При высоких значениях коэффициента затухания h 0 ам-
 2
2
плитуда усилия на штоке H плавно возрастает с ростом частоты возмущающего воздействия.
1.11. Типы вибровозбудителей
Вибровозбудителями называются устройства, предназначенные для возбуждения механических колебаний. Для возбуждения механических колебаний используются следующие способы возбуждения вибрации.
1. Использование свободных колебаний механической системы. В динамических системах с достаточно малым демпфированием могут использоваться затухающие свободные колебания, энергия которых пополняется периодическими импульсами, сообщаемыми колебательной системе через целое число циклов свободных колебаний. На рис. 21 изображена осциллограмма затухающих колебаний x, энергия которых периодически пополняется импульсами I. На этом же рисунке показана траектория состояний x и x в процессе этих ко-
лебаний.
2. Кинематическое возбуждение колебаний – жёсткий привод с принудительным движением рабочего органа. В таких системах колебания чаще всего создаются кривошипно-шатунными, эксцентриковыми, кулачковыми и др. механизмами. Количество степеней свободы таких систем равно нулю, параметры колебаний (амплитуда, скорость) зависят только от характеристик привода.
- 44 -