кинетическая энергия тела при вращательном движении
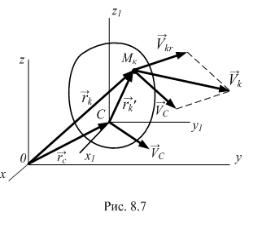
Величина Tc(r) является кинетической энергией относительного
движения системы относительно системы координат, движущейся |
поступательно вместе с ее центром масс, или кинетической энергией |
системы относительно центра масс. Формула (8.25) выражает теорему |
Кенига: кинетическая энергия системы в абсолютном движении складывается |
С |
|
|
|
|
|
|
|
|
из кинетической энергии центра масс, если в нем сосредоточить всю массу |
системы, и кинетической энергии системы относительно центра масс. |
|
8.3.3. К нетическая энергия твердого тела при |
|
|
поступательном движении |
|
|
ПриT |
|
|
mk |
|
, |
(8.26) |
поступательном движении твердого тела скорости всех точек |
тела од наковы: Vk |
V , поэтому кинетическая энергия тела равна сумме |
кинетическ х энерг |
й всех его точек |
|
|
|
|
|
n m V 2 |
|
V 2 n |
mV 2 |
|
|
|
|
k |
k |
|
2 k 1 |
2 |
|
|
|
k 1 2 |
|
|
|
|
где m – масса тела; V – скорость точки тела. |
|
|
|
|
А |
|
8.3.4. Кинетическая энергия при вращении тела вокруг |
|
бнеподвижной оси |
|
|
|
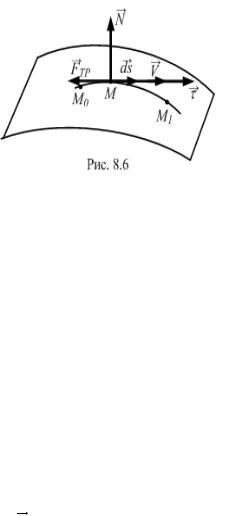
При вращении тела вокруг неподвижной оси кинетическую энергию можно вычислить, если учесть, что скорость точки Мk тела можно
|
выразить по формуле |
|
|
Vk |
hk , |
|
|
|
|
|
|
|
|
|
|
|
|
|
где hk – кратчайшее расстояние от точки Мk до оси вращения; ω – угловая |
|
скорость тела. |
|
|
|
|
|
|
2 |
|
И |
|
Тогда кинетическая энергия вращающегося тела равна сумме |
|
кинетических энергий всех точек телаД: |
|
n |
m |
V 2 |
2 |
n |
|
|
|
2 |
|
|
T |
k |
k |
|
|
mk hk2 |
|
J z , |
|
2 |
2 |
2 |
|
k 1 |
|
k 1 |
|
2 |
|
|
|
или |
|
|
|
T J |
z |
, |
|
(8.27) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Jz – момент инерции тела относительно оси вращения Oz. Следовательно,
вокруг неподвижной оси равна половине произведения момента инерции тела
относительно оси вращения на квадрат угловой скорости тела.
Из сравнения (8.26) и (8.27) следует, что эти формулы математически подобны, отличаются лишь тем, что при вращательном движении