Материал: 2192
|
АНАЛИТИЧЕСКАЯ МЕХАНИКА |
|||||||
|
10. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ |
|
|
|||||
В анал т ческой механике изучают равновесие и движение |
||||||||
механическ х с стем на основе принципа возможных перемещений. |
|
|||||||
С |
|
|
|
|
|
|
|
|
|
10.1. Связи и их классификация |
|
|
|||||
Механ |
|
с стемой |
называют |
совокупность |
связанных |
|||
материальных точек |
ли тел. Тела, ограничивающие перемещения |
точек |
||||||
механическойстемы, называют связями. Математически связи выражаются |
||||||||
условиями, равенствами или неравенствами, которые накладываются на |
||||||||
уравнен я дв жен я механической системы. Уравнение связи в общем |
||||||||
случае можно выразить в форме |
|
|
|
|
|
|
||
|
б |
|
|
|
|
(10.1) |
||
|
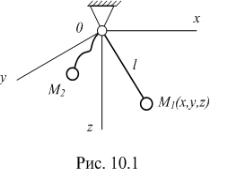
f(x, у, z; х, y , z ; x , |
y , z ; ...; t) = 0. |
|
|
||||
Наиболее часто |
удем пользоваться связями, в уравнения которых |
|||||||
входят производные по времени от координат не выше первого порядка. |
||||||||
Для механической системы, состоящей |
|
из |
n точек, |
m уравнений |
||||
|
|
А |
|
|
||||
связей представляются системой уравнений |
|
|
|
|
|
|||
fs ( xk , yk , zk , xk , yk , zk ; t) = 0, k=1, 2,…,n; s=1, 2,…,m. |
(10.2) |
|||||||
Если в уравнения связей (10.2) входят только координаты точек и не |
||||||||
входят производные от координат, то связи называются геометрическими. |
||||||||
|
|
|
Д |
|
||||
Уравнения геометрических связей для системы имеют вид |
|
|
||||||
|
fs ( xk , yk , zk , t) = 0, |
k=1, 2,…,n; |
|
s=1, 2,…,m. |
|
|||
Если в уравнения связей, кроме координат входят еще и проекции |
||||||||
скоростей точек на оси координат, то связи называют кинематическими. В |
||||||||
|
|
|
|
|
И |
|||
этом случае уравнения связей являются дифференциальными уравнениями |
||||||||
для координат точек. Из геометрических связей дифференцированием |
||||||||
можно получить связи кинематические. Из кинематических связей |
||||||||
геометрические связи получаются не всегда, так как дифференциальные |
||||||||
уравнения не всегда могут быть проинтегрированы. |
|
|
||||||
237