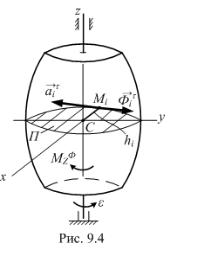
Так как линии действия центробежных сил инерции проходят через центр вращения О, то искомый момент пары равен сумме моментов
вращательных сил инерции относительно точки О: M Ф M0Ф mi ri2 . Таким образом, алгебраическая величина момента пары, составленной
силами инерции, |
M Ф – J z , где Jz – момент инерции тела относительно |
С |
|
|
|
|
оси вращения; – алгебраическая величина углового ускорения тела. |
Вектор M Ф |
направлен перпендикулярно плоскости фигуры, т. е. |
совпадает с осью вращения тела и направлен противоположно вектору |
углового ускорен |
я: |
|
|
|
плоскости |
|
|
|
|
|
M Ф J z . |
|
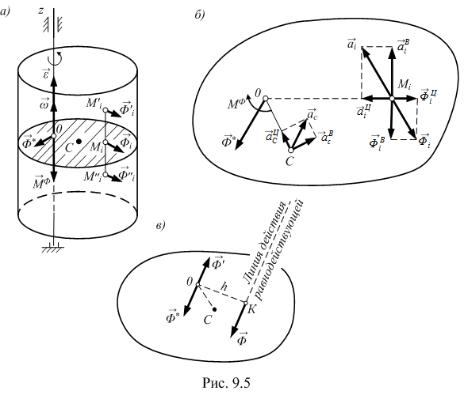
Как звестно |
|
з стат ки, силу Ф* и пару с моментом M Ф, |
лежащие в |
одной |
|
, можно заменить одной действующей силой Ф, |
|
образом |
|
геометр чески равной главному вектору (рис. 9.5,в). |
|
Л н я действ я этой силы отстоит от центра приведения О на |
расстоян |
|
|
|
M Ф |
|
|
|
|
А |
|
|
|
|
h = |
Ф |
. |
(9.17) |
Таким |
|
|
, при вращении твёрдого тела, имеющего плоскость |
материальной симметрии, вокруг оси, перпендикулярной этой плоскости, силы инерции точек тела приводятся к равнодействующей силе, лежащей в плоскости симметрии.
|
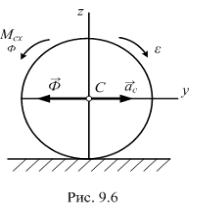
9.4.4. Плоское движение симметричного тела |
Пусть твёрдое тело имеет плоскость |
|
материальной |
симметрии |
и |
совершает |
|
движение, при котором |
все |
точки тела |
|
перемещаются |
параллельно |
|
Д |
этой плоскости |
И |
(рис. 9.6). Плоское движение тела слагается из |
поступательного движения вместе с центром |
масс и вращательного вокруг оси, проходящей |
через центр масс перпендикулярно плоскости |
материальной симметрии.
|
|
Силы инерции приводятся к главному вектору |
Ф mac , |
приложенному к центру масс и к паре сил с моментом |
M cxФ – Jcx . |
Главный вектор сил инерции и результирующая пара сил инерции так же, как и центр масс тела, лежат в плоскости материальной симметрии.