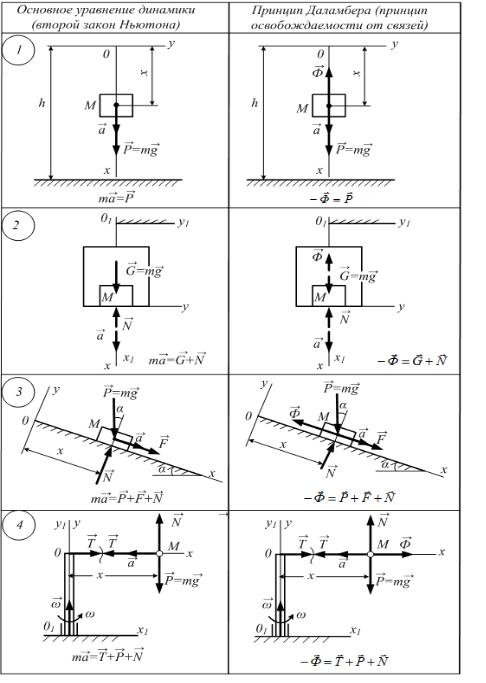
Основное уравнение динамики Ньютона и векторное уравнение принципа Даламбера для несвободной материальной точки представлены на рис. 9.2,3. Дифференциальные уравнения движения для обоих случаев являются одинаковыми:
С |
mx mg sin kt ; x g sin m t ; |
|
|
|
|
|
|
|
|
k |
|
k t 2 |
t 2 |
|
k t3 |
|
|
С1; x g sin |
|
С1t C2 . |
|
|
|
|
|
|
|
|
|
x g sin t |
m 2 |
2 |
m 6 |
|
|
|
|
|
В данном случае с ла инерции Ф является силой противодействия |
силам P F N . |
|
|
|
|
|
|
|
|
|
|
горизонтальной |
|
|
|
|
|
|
9.2.4. Вращение тела в горизонтальной плоскости |
Тело массой m, пр нимаемое за материальную точку М, вращается в |
б |
|
|
|
|
|
|
плоскости вокруг вертикальной оси на стержне длиной |
х=r с постоянной угловой скоростью (рис. 9.2,4).
Определ ть ус л е в стержне и дать характеристику движения тела. В данном случае точка М совершает вращательное движение, поэтому
для пр менен я пр Анципа осво ождаемости от связей необходимо мысленно прекратить вращение системы, зафиксировать ее параметры, применить к точке принцип осво ождаемости от связей, с помощью которого внутренние силы реакции системы переводятся в разряд внешних сил, действующих на точку.
На рис. 9.2,4 показаны силы, действующие на точку М с использованием принципа освобождаемости от связей, и приведены векторные уравнения движения точки для основного уравнения динамики Ньютона и принципа Даламбера. Усилие в стержне Т, согласно принципу
Даламбера, равно силе инерции Ф. |
В данной задаче сила инерции Ф |
|
|
|
И |
является реальной единственной действующей силой, создающей |
динамическую силу реакции Т в Дстержне. По Ньютону, mx T ; |
по |
Даламберу, Ф T . |
|
|
|
|
|
T mr 2 ; |
Т=Ф. |
|
|
При условии const сила инерции Ф и реакция связи Т находятся в |
стационарном равновесии. |
|
|
|
|
9.2.5. Равновесие математического маятника при вращении |
|
Маятник и кронштейн вращаются с угловой скоростью |
|
(рис. 9.3,1). Маятник находится в относительном покое в неинерциальной системе координат Оху.