При вращении тела вокруг неподвижной оси, а также при плоскопараллельном движении (вращении вокруг мгновенного центра скоростей) элементарная работа определяется по формуле
Аk МО(Fk ) k ,
где MО(Fk ) – момент силы относительно оси вращения, проходящей через
точку О; δφk – возможное угловое перемещение.
Элементарная работа положительна, когда направления момента и возможного углового перемещения совпадают, и отрицательна, когда они противоположны. Если в состав системы входят тела, совершающие поступательное, вращательное и плоскопараллельное движения, уравнение
(10.8) можно представ ть в виде |
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
s |
|
|
s ) |
n |
|
|
0 . |
(10.11) |
|
F |
k |
cos(F , |
M |
0 |
F |
k |
|
k 1 |
k |
|
|
k |
k |
k 1 |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
План решен я |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
1. |
ть все |
|
задаваемые |
силы |
и |
|
показать |
моменты |
задачи |
|
|
|
|
|
|
|
|
|
|
действующ х пар с л. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
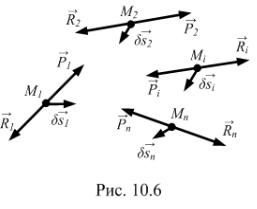
2. Сообщ ть с стеме возможное перемещение и показать на рисунке |
углы δφk |
элементарных |
|
поворотов |
тел |
и векторы |
sk элементарных |
перемещенийИзобразточек приложения сил.
3. Подсчитать элементарные работы всех активных сил на заданном возможном перемещении и составить уравнение (10.11).
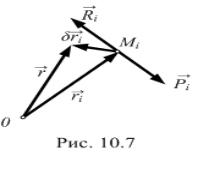
4. Выразить все величины δsk, δφk через какую-либо одну, для чего
|
следует установить зависимость между δsk и δφk, учитывая, что модуль |
|
|
А |
|
вектора sk |
|
вычисляется как длина дуги по формуле sk rk δφk. |
|
|
Д |
После замены величин sk , δφk через одну из полученного уравнения можно определить искомую силу, или искомый момент пары сил, или
искомую зависимость между действующими силами и моментами пар сил. |
|
|
|
|
k |
|
|
|
И |
10.6.2. Кинематический метод |
При использовании кинематического метода учитываются связи |
между возможными |
скоростями Vk точек приложения сил и их |
возможными перемещениями s |
|
, а также между угловыми скоростями ωk |
звеньев, к которым приложены силы, и их возможными угловыми |
перемещениями δφk : V |
|
sk |
; |
k |
|
k |
. |
|
|
|
k |
|
dt |
|
|
dt |
При этом показывают не возможные перемещения, а возможные скорости точек приложения сил и возможные угловые скорости звеньев, к которым приложены силы. Принцип возможных перемещений