т.е. изменение кинетической энергии точки на каком-либо перемещении равно работе силы, действующей на точку на том же перемещении.
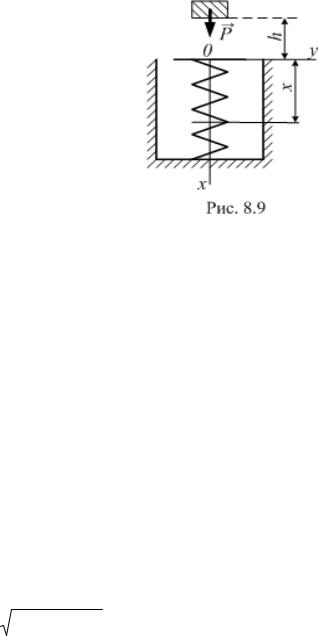
8.3.7. Сжатие пружины падающим грузом
Тело, имеющее силу тяжести |
P , |
падает без |
С |
с |
высоты h. |
начальной скорости на пружину |
Определить наибольшее сжатие пружины x, если статическое сжат е ее под действием силы тяжести этого тела равно xСТ. Массой пружины можно
пренебречь (р с. 8.9). |
|
|
изменен |
Пр |
к дв жению тела теорему об |
к |
нет ческой энергии точки |
|
mV 2 |
– |
mV 2 |
|
|
0 A . |
большем |
|
2 |
|
2 |
Пр мем за начальное положение тела начало его падения с высоты h, |
а за конечное – момент максимального сжатия пружины. Изменение
|
|
|
кинетической энерг |
за этот промежуток времени равно нулю, так как |
V0=0 и при на |
сжатии пружины V=0. |
|
А |
Следовательно, ра ота |
=0, т.к. положительная работа падения тела с |
высоты (h+x) равна отрицательной работе сжатия пружины. На тело после его соприкосновения с пружиной действуют две силы: сила тяжести тела
P и сила упругости пружины. Сила P совершает работу на перемещении
(h+x), сила упругости – на перемещении х. |
|
|
|
|
|
|
|
|
Д |
Следовательно, A |
P(h x) |
c |
x |
2 |
0 . |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
Р |
|
В положении статического равновесия Р=схCT, а с |
|
. |
|
|
|
|
|
|
|
|
|
|
|
хСТ |
|
h x |
|
1 |
x2 0 или |
|
x2 |
|
И |
Поэтому |
|
|
|
2xСТ x 2xСТ h 0. |
|
|
2xСТ |
|
|
|
|
|
|
|
|
Решая это квадратное уравнение, имеем |
|
|
|
|
|
|
|
x = x + x2 |
|
+ 2x h . |
|
|
|
|
|
|
СТ |
|
СТ |
|
СТ |
|
|
|
Знак плюс перед корнем выбран потому, что х>хCT. При h=0 наибольшее сжатие пружины х=2хCT.
Режим падения груза на упругую систему с нулевой высоты называют
мгновенным приложением постоянной силы к упругой механической системе.
Максимальная динамическая сила в пружине при мгновенном ее нагружении связана со статической силой Р выражением
PДИН K Д Р.
