Значения параметров при начальных условиях подставляют в уравнения, полученные при интегрировании исходных дифференциальных уравнений и определяют значение постоянных интегрирования С1,…,С6. После этого уравнения переписывают с
Сучетом найденных значений постоянных и определяют искомые параметры.
ледует обрат ть внимание, что составленные дифференциальные
уравнен я оп сывают движение точки лишь до тех пор, пока на нее действуют вошедш е в правые части уравнений силы и пока сохраняются соответствующ е законы взаимодействия. Если с какого-то момента времени действ я некоторых сил прекращаются или начинают действовать новые с лы, то для последующего движения надо составлять новые дифференц альные уравнения; при этом положение и скорость точки в
движеня. Кроме того, в некоторых случаях закон взаимодействия может
конце предшествующего движения будут начальными для нового
быть так м, что при зменении направления движения будет изменяться
вид д фференц ального уравнения (или уравнений) этого движения
свой вид при измененииАнаправления движения, если такое изменение может произойти. Когда вид уравнения изменяется, надо для движений в одну и в другую сторону составлятьДсвои уравнения, поступая с начальными условиями так же, как в случае, когда на точку начинают
(например, при действии силы трения или силы сопротивления, |
пропорциональнойбквадрату скорости). |
Поэтому, |
составив |
дифференциальное уравнение движения, надо проверить, сохраняет ли оно |
действовать новые силы. Прежде чем интегрировать составленные дифференциальные уравнения движения, надо все переменные силы в
правых частях уравнений представить в явном виде как функции |
соответствующих аргументов. |
И |
|
|
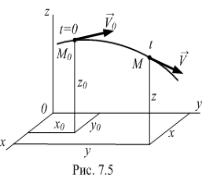
При движении точки в плоскости Оxy |
имеется два |
дифференциальных уравнения движения. В решения этих уравнений входят четыре произвольные постоянные. Постоянные определяются из
начальных условий: при t=t0=0 |
x=x0; y=y0; |
|
|
х V0x ; |
y V0 y . |
В случае прямолинейного движения точки имеется только одно дифференциальное уравнение и в его решение входят две произвольные постоянные. Для их определения необходимо задать начальные условия: