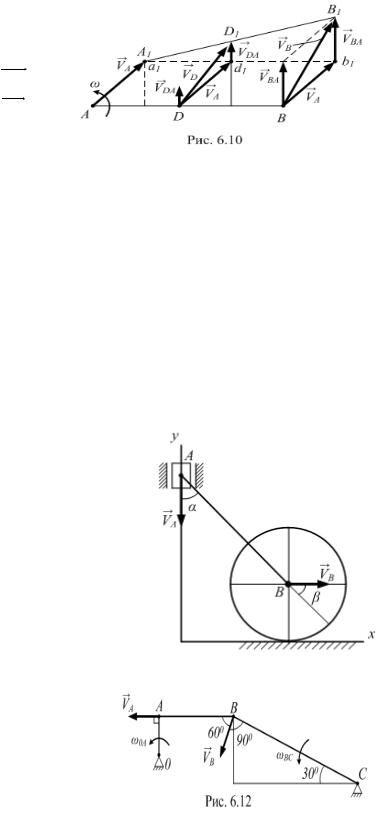
стороны (рис. 6.18). МЦС находится внутри отрезка АВ. Для определения
ω составляем выражение |
|
VA |
|
VB |
, откуда АР |
V |
А |
AB. |
AP |
AB AP |
|
|
|
|
|
VA VB |
С |
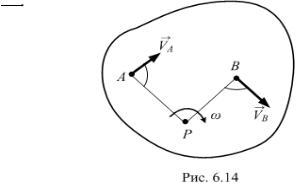
лучай 5. На р с. 6.19 тело перекатывается без |
проскальзыван я по поверхности неподвижного |
тела. МЦС наход тся в точке соприкосновения тел в |
точке Р. |
|
и |
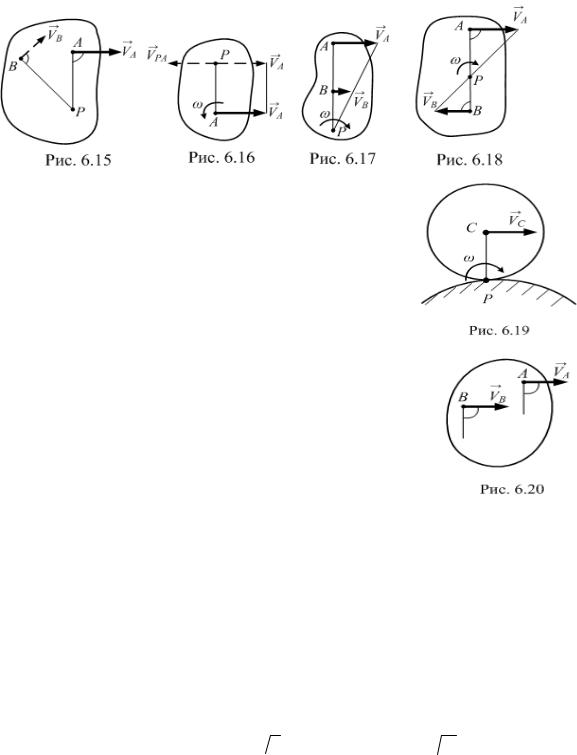
Случай 6. На рис. 6.20 скорости двух точек тела |
|
б |
параллельны. В этом случае МЦС находится в |
бесконечности, т.е. отсутствует. Тело совершает |
мгновенное поступательное движение, тогда скорости |
двух точек и всех других точек тела одинаковы, а их |
ускорения в общем случае могут быть разными. |
|
А |
неподвижной плоскости, имея скоростьДцентра V0 . Определить скорости точек А, М, N обода колеса в данный момент времени.
Пример 4.
Колесо радиусом R (рис. 6.21) катится без скольжения по
Решение.
Мгновенный центр скоростей в этом случае находится в точке Р
|
соприкосновения |
колеса с |
плоскостью. |
Угловая |
скорость |
колеса |
|
определяется по |
формуле |
|
V0 |
|
V0 |
. |
Скорости |
указанных |
точек |
|
ОP |
R |
|
|
|
|
|
|
|
И |
|
определим с помощью МЦС: |
VA AP 2V0 ; |
|
|
|
VM VN MP V0  2 , т.к. МР NP R
2 , т.к. МР NP R 2.
2.
Скорости точек колеса направлены по перпендикулярам к отрезкам прямых, соединяющих мгновенный центр скоростей с рассматриваемыми точками в направлении вращения.