|
dVB |
a |
|
; |
|
dV A |
a |
|
, |
|
|
|
|
|
|
|
|
dt |
B |
|
|
dt |
A |
|
|
|
|
|
|
|
|
|
|
|
получим |
|
|
|
|
|
|
|
|
|
|
a B |
|
aA . |
|
|
(5.3) |
Теорема о поступательном движении твёрдого тела доказана. |
С |
|
|
|
|
|
|
|
|
Движение твёрдого тела, для которого векторы скоростей точек равны |
только в один момент времени, |
а не всё время, |
называется мгновенным |
поступательным дв жен ем. Для мгновенного поступательного движения ускорен я точек в общем случае не являются одинаковыми.
Поступательное дв жение твёрдого тела полностью определяется
движен |
ем одной его точки уравнениями |
|
|
|
x f1 t ; |
y f 2 t ; |
z f3 t . |
(5.4) |
ледовательно, сво одное твёрдое тело, совершающее поступательное |
движен |
, меет три степени |
|
и уравнения |
(5.4) являются |
кинемат
уравнен ямисвободыпоступательного движения твёрдого тела. Для описания поступательного движения твёрдого тела используют
кинемат ку точки.
движение, при которомАимеется геометрическое место неподвижных точек тела (ось вращения) в течение всего времени движения. При этом остаются неподвижными все точки тела, расположенные на прямой, проходящей
5.2. Вращательное движение твёрдого тела
5.2.1. Угол поворота, угловая скорость и угловое ускорение
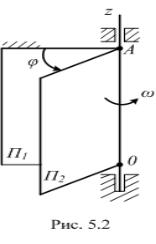
Вращением твёрдого тела вокруг неподвижной оси называют такое его
Если А и О – неподвижные точкиДтела (рис. 5.2), то осью вращения является ось Oz. Одно направление оси Oz принимается за положительное.
через его неподвижные точки.
плоскость П1 и подвижную плоскость П2 , котораяИ может быть совмещена с вращающимся телом. Пусть в начальный момент времени обе плоскости
Через ось вращения проведём неподвижную
совпадают. Тогда в момент времени t положение вращающегося тела можно определить двугранным углом φ между плоскостями (рис. 5.2).
Угол φ называют углом поворота тела (угловой координатой).
Положение вращающегося тела в момент времени t задают уравнением