Материал: 2192
6.ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
6.1.Уравнения плоского движения твёрдого тела
Плоским движением твёрдого тела называют |
|
|
||||||
С |
|
|
|
|
|
|
||
такое движение, при котором все точки |
|
|
||||||
сечения тела движутся в своей плоскости. |
|
|
|
|||||
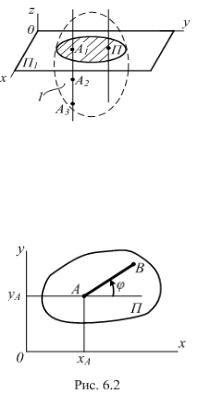
Пусть твёрдое тело 1 совершает плоское |
|
|
||||||
движен е |
(р с. |
6.1). Секущая плоскость П1 |
в |
|
|
|||
жение |
П, |
которое |
|
|
||||
теле 1 |
образует |
сечение |
Рис. 6.1 |
|||||
перемещается в секущей плоскости П1. |
|
|
|
|||||
Если параллельно плоскости П1 выполнить другие сечения тела, |
||||||||
например через точки А2, А3 |
т.д., лежащие на одном перпендикуляре к |
|||||||
сечениям, то все эти точки и все сечения тела будут перемещаться |
||||||||
одинаково. |
б |
|
|
|
||||
|
|
|
|
|
|
|
|
|
Следовательно, дв |
тела в этом случае |
|
|
|||||
полностью определяется движением одного из |
|
|
||||||
его сечен й в какой-ли о из параллельных |
|
|
||||||
|
|
А |
|
|||||
плоскостей, а положение сечения – положением |
|
|
||||||
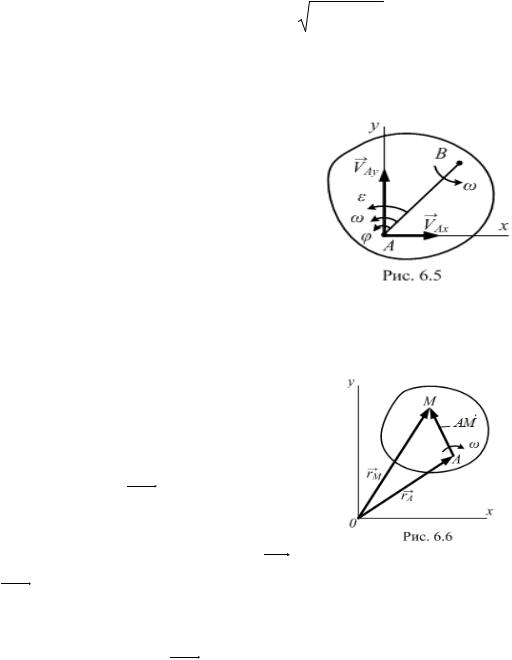
двух точек этого сечения, например |
и В (рис. |
|
|
|||||
6.2). Положение сечения П в плоскости Оxy |
|
|
||||||
определяют |
положением |
отрезка |
В, |
|
|
|||
проведённого в этом сечении. |
|
|
|
(хА, уА) и |
В(хВ, уВ) |
|||
Положение |
двух |
точек |
на |
плоскости |
||||
характеризуется четырьмя параметрами (координатами), на которые |
||||||||
накладывают одно ограничение – уравнение связи в виде длины отрезка |
||||||||
АВ: |
|
|
(хА – хВ)2 + (уА – уВ )2 = В2. |
|
|
|||
|
|
|
|
|
||||
|
|
|
|
|
|
И |
||
Поэтому положение сечения П в плоскости можно задать тремя |
||||||||
независимыми параметрами – координатамиДхА, уА точки А и углом φ, |
||||||||
который образует отрезок АВ с осью Оx. Точку А, выбранную для |
||||||||
определения положения сечения П, называют полюсом. |
|
|||||||
При движении сечения тела его кинематические параметры являются |
||||||||
функциями времени |
хА=х(t); |
уА=у(t); φ=φ(t) . |
(6.1) |
|||||
Уравнения |
|
|||||||
(6.1) являются |
кинематическими |
уравнениями |
плоского |
|||||
(плоскопараллельного) движения твёрдого тела. Теперь покажем, что в соответствии с полученными уравнениями (6.1) тело при плоском движении совершает поступательное и вращательное движения. Пусть на рис. 6.3 сечение тела, заданное отрезком А1В1 в системе координат Oxy, переместилось из начального положения 1 в конечное положение 2.
187