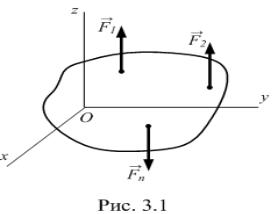
3.1.2. Уравнения равновесия пространственной системы параллельных сил
Направим ось Оz параллельно |
силам F1, F2 , …, |
Fn (рис. 3.1). Тогда |
проекции |
параллельных |
сил на |
С |
|
|
перпендикулярные им оси Оx и Oy |
будут |
равны |
нулю, |
и |
уравнения |
n |
0; |
n |
|
0 |
|
окажутся |
F |
F |
|
i 1 ix |
|
i 1 |
iy |
|
|
|
оси |
справедл выми |
|
для |
всех систем |
параллельных с |
л, т.е. |
превратятся в |
тождества. |
|
|
Оz |
|
|
|
Момент |
относ тельно |
каждой из |
параллельных сил равен |
нулю, |
уравнен е |
n |
|
тоже выполняется для всех |
систем |
Мz (F) 0 |
|
|
|
i 1 |
|
|
|
|
параллельных |
с л. |
От расывая |
уравнения |
равновесия, |
которые |
выполняютсябтождественно при выбранном направлении оси Оz, и учитывая, что сумма проекций сил на эту ось является алгебраической суммой сил, из (5.13) получаем следующие три уравнения равновесия пространственной системы параллельных сил:
приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма этих сил была равна нулю и суммы моментов сил относительно двух координатных осей, перпендикулярных силам, также были равны нулю.
|
n |
|
n |
|
n |
|
|
|
|
Fiz 0 ; |
M x (Fi ) 0; |
M y (Fi ) 0 |
, |
(3.5) |
т.е. |
i 1 |
|
i 1 |
|
i 1 |
|
|
|
для равновесия пространственной системы параллельных сил, |
|
|
А |
|
|
|
|
|
|
|
Д |
|
3.2. Уравнения равновесия плоской системы сил
относительно этих осей равны нулю, так как ониИпересекают эти оси или параллельны им.
Расположим оси Оx и Oy в плоскости действия сил (рис. 5.5). Так как
ось Oz перпендикулярна силам, то |
n |
выполняется для всех |
Fiz 0 |
|
i 1 |
|
плоских систем сил, т.е. является тождеством. Каждая из сил расположена |
в одной плоскости с осями координат Оx и Oy |
и поэтому ее моменты |