Годографом вектора называют геометрическое место
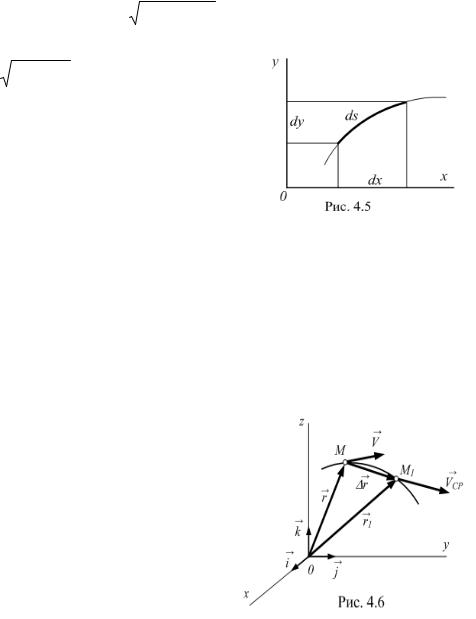
скорости точки V в момент времени t, которая определяется как предел средней скорости, если промежуток времени, за который определяется
средняя скорость, стремится к нулю, т.е. V lim |
r |
dr . |
t 0 |
t |
dt |
Таким образом, скорость точки равна первой производной по времени от |
Сеё радиуса-вектора. Она направлена по касательной к траектории в сторону движения точки. Для характеристики переменного вектора используют понятие его годографа.
конца вектора, если переменный вектор в различные моменты времени
откладывать от одной той же общей точки.
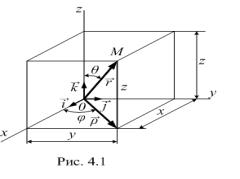
радиусаразличные-вектора r (р с. 4.6). Последовательные положения вектора r в моменты времени откладываются в этом случае от точки О.
огласно определению, траектория точки является годографом
Первая про зводная по времени от радиуса-вектора есть скорость точки, направленнаябпо касательной к траектории, т. е. к годографу радиуса-вектора.
А
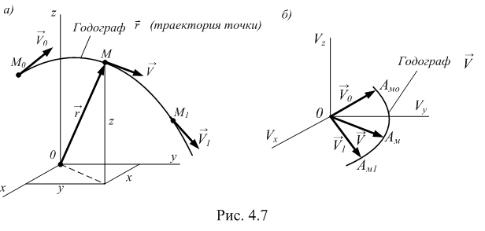
Годографом вектора скорости является линия, на которой располагаются концы вектора скорости в различные моменты времени,
если их начала совместить в одной общей точке (рис. 4.7). |
Для |
построения годографа Двектора скорости выбирают точку, |
например О (рис. 4.7,б), и начала векторов скорости для различных |
моментов времени помещают в эту точку, не изменяя их направлений. |
Каждой точке М траектории (рис. 4.7,а) соответствует своя изображающая |
точка АМ |
на годографе вектора скорости (см. рис. 4.7,б). Масштаб |
скоростей при построении годографа вектора скоростиИможет быть выбран |
отличным от масштаба для скоростей, изображаемых в точках траектории. |
При движении точки М по траектории соответствующая ей изображающая |
точка АМi |
движется по годографу вектора скорости. |
При равномерном движении точки по прямой годографом вектора скорости является одна точка, при неравномерном движении – отрезок этой прямой.