Материал: 2192
плоскости, например, точки О (рис. 1.6, б). Тело, ограничивающее свободу движения другого тела, является по отношению к нему связью.
Твердое тело, свобода движения которого ограничена связями,
называют |
несвободным. Все силы, действующие на несвободное твердое |
тело, наряду с делением на внешние и внутренние, можно разделить на |
|
активные (задаваемые) и реакции связей. Активные силы выражают |
|
С |
|
действия на твердое тело других тел, вызывающих или стремящихся |
|
вызвать |
изменение его кинематического состояния (например, |
равновес |
я). |
Реакц ей связи называют силу или систему сил, выражающих механическое действ е связи на тело. Одним из основных положений механики является пр нцип освобождаемости от связей: любое
несвободное твердое тело можно превратить в свободное, если
освобод ть его от связей, заменив их действие силами реакций. При определен направлен й реакций связей можно использовать следующее
: куда запрещено перемещение, оттуда направлена реакция
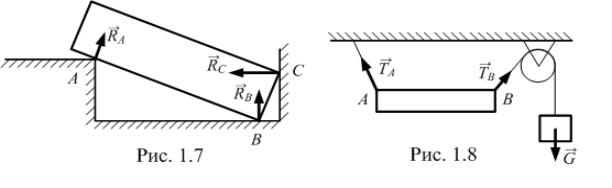
1. Гладкое касание (рис. 1.7). Реакция гладкой поверхности направлена по нормали к поверхности в точке касания.
связи. |
|
правило |
|
Для плоской с стемы сил рассмотрим восемь основных типов |
|
связей направлен я х реакций. |
|
|
б |
2.Нить (рис. 1.8). Нитью называют любую гибкую связь (канат, цепь
ит.п.), препятствующую перемещению тела в одном направлении вдоль нити. Реакция направлена вдоль нити от тела, TB = G.А
Д
3. Невесомый стержень (рис. 1.9). НевесомымИстержнем называют тело с двумя шарнирами на его концах, весом которого можно пренебречь, причем силовые воздействия приложены только в шарнирах. Для
прямолинейного стержня реакция RA направлена вдоль стержня, для изогнутого реакция RВ направлена вдоль линии действия, проходящей
через шарниры. Направление реакции (от тела или к телу) заранее неизвестно, так как зависит от действия других сил на тело.
146
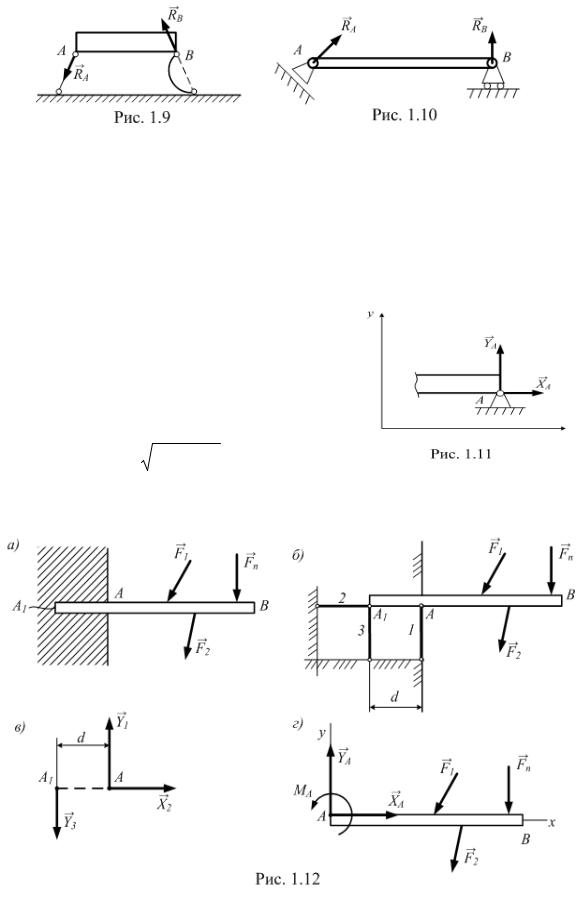
4. Подвижные цилиндрические шарниры А и В на плоских подшипниках (рис. 1.10).
С |
|
|
|
|
||||
Реакц я направлена перпендикулярно опорной поверхности. Это |
||||||||
поверхности |
|
|||||||
объясняется тем, что данная связь запрещает перемещение балки в |
||||||||
направлен |
|
, |
перпенд кулярном опорной поверхности, оставляя |
|||||
возможным поворот вокруг шарнира, а также перекатывание на катках |
||||||||
вдоль этой |
|
|
|
|
(шарнир В). На расчетных схемах катки можно не |
|||
показывать, |
огран ч ваясь показом зазора между подвижным шарниром и |
|||||||
|
|
б |
||||||
опорной поверхностью (шарнир А). |
||||||||
5. |
Неподв жный |
цилиндрический |
||||||
шарнир |
(р |
|
с. 1.11). Реакция заменяется |
|||||
двумя |
|
|
вза мно-перпендикулярными |
|||||
|
|
|
|
|
А |
|||
составляющими |
X A |
и |
YA , |
параллельными |
||||
предварительно проведенным осям Ox и Oy. |
||||||||
Модуль реакции |
|
|
|
|
Д |
|||
|
|
|
RA |
X A2 YA2 . |
||||
6. Жесткая заделка |
|
|||||||
|
|
|||||||
Балка АВ одним концом |
|
1 заделана в стену (рис. 1.12, а). |
||||||
|
|
|
|
|
|
|
|
И |
147
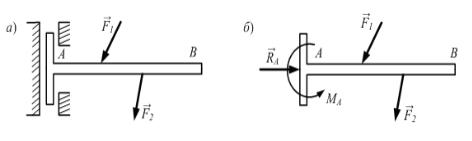
Такое крепление консольной балки называют плоской жесткой заделкой в точке А. На балку действует система сил ( F1, F2 , …, Fn ).
Определим реакции, которые необходимо приложить к балке при освобождении ее от связей в точке А. Чтобы свободное твердое тело в плоскости превратить в неподвижное, необходимо исключить возможность горизонтального и вертикального перемещения балки в точке А. Чтобы исключить возможность поворота сечения балки в точке А,
Снеобходимо наложить еще одну связь. Таким образом, в точке А балка имеет три связи, при освобождении от которых в точке А сечения балки необход мо пр лож ть три реакции.
На р с. 1.12, б показана модель плоской жесткой заделки,
составленная з трех стержней. При освобождении от связей в шарнирах, соединяющформируютсях стержни с балкой в точках А и А1, показаны реакции связей, направленные вдоль соответствующих стержней (рис. 1.12, в). Если силу
реакции Y3, пр ложенную в точке А1, перенести параллельно самой себе в |
|||
точку А, то дополн тельно в точке А получим вертикальную силу и |
|||
б |
|
|
|
присоед ненный момент пары сил. Таким образом, из указанных сил |
|||
три реакц и связи X , Y |
, M |
плоской жесткой заделки, |
|
показанные в точке А (р с. 1.12, г), где X |
= X2 ; |
YА = Y1 Y3 ; |
MА = |
Y3 |
d. |
А |
|||
|
|
Неизвестные реакции X2 |
, Y1 |
, Y3 |
и плечо d в данном случае |
являются условными, дополнительными величинами, которые введены для обоснования числа реакций в плоской жесткой заделке, поэтому их определять не надо.
На расчетной схеме (рис. 1.12, г) известны силы F1 |
, F2 , …, |
Fn и |
|
|
|
Д |
|
|
точки их приложения на консольной балке. Неизвестными являются |
||
реакции, показанные в точке , которые определяют из трех уравнений |
||
равновесия, записанных для плоской системы произвольных сил. |
|
|
7. Скользящая заделка с одной степенью свободы
степень свободы (рис. 1.13, а). Две другие степени свободы (перемещение в направлении, перпендикулярном направляющей, и поворот вокруг точки А) запрещены. При освобождении от связи ее действие заменяется
реакцией |
RA , направленной перпендикулярно направляющей, и |
|||
реактивным |
моментом |
МA , |
соответствующим |
запрещенным |
Рассмотрим балку АВ, имеющую возможность вертикального перемещения вдоль направляющей в точке ИА, т.е. реализующую одну
Рис. 1.13
148
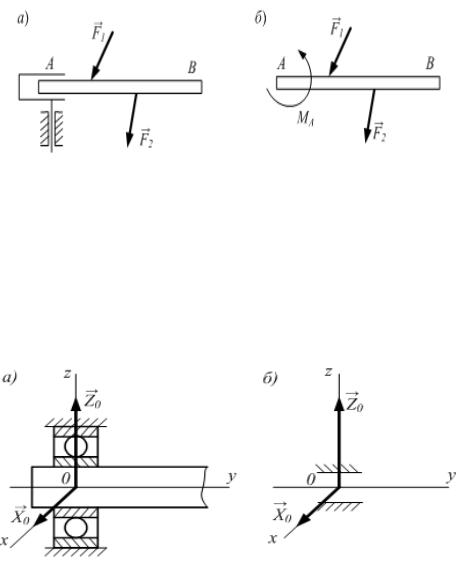
8. Скользящая заделка с двумя степенями свободы
Рассмотрим балку АВ, имеющую возможность перемещения по двум взаимно-перпендикулярным направлениям в точке А (рис. 1.14, а).
Балка лишена одной степени свободы вращения вокруг точки А , следовательно, при освобождении от связи ее действие заменяется реактивным моментом МA (рис. 1.14,б).
С |
|
|
|
|
||
их |
|
|
||||
|
|
|
|
Рис. 1.14 |
|
|
Для пространственной системы сил рассмотрим четыре основных |
||||||
типа связей направлен я |
реакций. |
|
|
|||
|
балки |
|
|
|||
1. Подш пн |
|
|
изо раженный на рис. 1.15,а, |
|
||
Подш пн к |
качен я, |
допускает |
||||
возможность поворота алки (вала) на некоторый угол вокруг осей Ox и |
||||||
|
|
|
А |
|
||
Oz, перпендикулярных оси подшипника Oy. Возможно также осевое |
||||||
перемещение |
|
. |
|
|
|
|
|
|
|
|
Д |
||
|
|
|
|
Рис. 1.15 |
И |
|
|
|
|
|
|
|
|
Данная связь лишает балку двух степеней свободы: запрещает |
||||||
перемещение вдоль осей Ox и Oz, перпендикулярных оси балки. На |
||||||
расчетной схеме реакция заменяется двумя составляющими: X 0 |
и Z 0 (рис. |
|||||
1.15,б). |
|
|
|
|
|
|
149
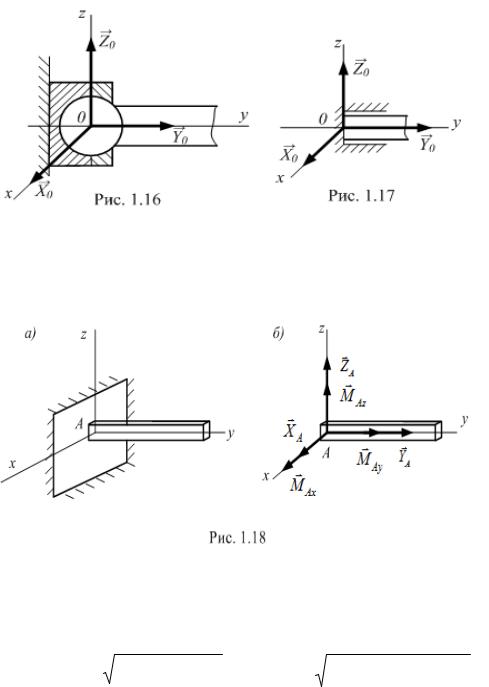
2. Шаровой шарнир и подпятник
На рис. 1.16 и 1.17 изображены шаровый шарнир и подпятник. Балка лишена возможности перемещения вдоль каждой их трех координатных
осей, поэтому на расчетной схеме показывают три составляющие опорной реакции: X 0, Y 0, Z 0.
С |
|
|
|
|
|
|
|
|
ли |
|
|
|
|
|
|||
Подпятн к представляет со ой сочетание цилиндрического шарнира с |
||||||||
б |
|
|
|
|||||
опорной поверхностью |
плоскостью. |
|
|
|
|
|
||
3. Жесткая заделка |
|
|
|
|
|
|
|
|
На р с. 1.18,а |
зо ражена пространственная жесткая заделка. |
|||||||
|
А |
|
|
|||||
|
|
|
Д* |
|||||
|
|
|
|
|
|
И |
||
Данная связь лишает балку всех шести степеней |
свободы в |
|||||||
пространстве. Реакция |
приводится к равнодействующей RA , которая |
|||||||
определяется через ее проекции на оси ХА, YА, ZА, и к паре сил с векторным |
||||||||
моментом МА, проекции которого на оси |
МAx, МАy, MAz. |
|
|
|||||
R* |
X 2 |
Y 2 |
Z 2 ; |
M |
A |
M 2 M |
2 M 2 . |
|
A |
A |
A |
A |
|
Ax |
Ay |
Az |
|
150