Материал: 2142
Лабораторнаяработа№6 СОЗДАНИЕПИД-РЕГУЛЯТОРАНАПЛКИРЕГУЛИРОВАНИЕ
ТЕМПЕРАТУРЫ
Теоретические основы ПИД-регулирования
Спропорц ональное регулирование, когда регулирующее воздей-
Цель работы: научиться работать с вычислениями и програм-
мировать алгоритмы регулирования.
Для регул рован я многих технологических процессов достаточно регуляторов первого, или второго порядка. Самыми распро-
страненными в дами регулирования являются следующие:
ствие пропорц онально сигналу на входе регулятора; обычно это сигнал ошибки между регул руемой величиной и ее заданным значением;
нтегральное регулирование, когда регулирующее воздействие пропорц онально определенному интегралу входного сигнала по
|
, взятому от начала отсчета до текущего момента, |
|
времени |
|
|
|
д фференц альное регулирование, когда регулирующее воздей- |
|
ствие пропорц онально производной входного сигнала по времени, |
||
|
ПИД-регулирование |
(пропорционально-интегрально-диффе- |
ренциальноеб), когда и сам входной сигнал, и его производная, и его опре- |
||
деленный интеграл присутствуютАв процессе регулирования с опреде-
ленными долями, определяемыми коэффициентами; сюда отнесем и ПИрегулирование, особенность которого заключается лишь в том, что коэффициент при производной входного сигнала равен нулю.
В промышленности для реализации пропорционально-
интегрально-дифференциального закона регулирования широко рас- |
||
пространены универсальные ПИД-регуляторы. Такие приборы пред- |
||
|
ПИД |
|
ставляют собой электронные устройства с аналоговой, либо цифровой |
||
(микропроцессорной) схемой, в Дпоследнее время гораздо более рас- |
||
пространены вторые. |
|
|
Также к числу микропроцессорных устройств относятся и ПЛК, |
||
на котором также можно реализовать алгоритм |
-регулирования, |
|
что в настоящее время также находит частое применение. Микропроцессорные устройства, в отличие от аналоговых, работа-
ют с дискретными данными и закон ПИД-регулирования в них реализован несколько иначе.
51
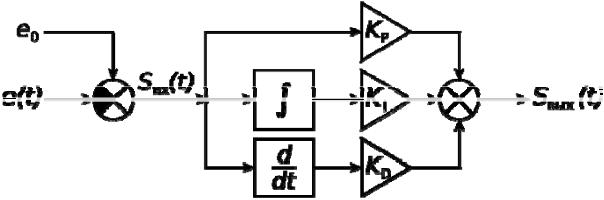
Структурная схема непрерывного ПИД-регулятора представлена на рисунке 40. Закон ПИД-регулирования для непрерывных систем можно записать уравнением:
|
t |
dSВХ (t) |
|
|
|
K P SВХ (t) K I SВХ (t)dt K D |
SВЫХ (t) , |
(1) |
|||
dt |
|||||
С |
0 |
|
|
||
|
|
|
|||
|
|
|
|
||
где SВХ (t) = e(t) - e0 – ошибка регулирования; e(t) – регулируемая величина; e0 – требование значение величины.
Зап шем уравнен е для дискретного ПИД-регулятора и найдем, как выч сл ть коэфф циенты дискретного ПИД-регулятора, исходя изикоэфф ц ентов непрерывного ПИД-регулятора.
б РисунокА40. Непрерывный ПИД-регулятор
Перепишем то же уравнениеД, предположив дискретность процессов по времени: если две соседние точки на оси времени будут отстоять друг от друга не на бесконечно малую величину, а на некоторое значение T, называемое периодом дискретизации, то в уравнении
(1) интеграл превратится в сумму, а производная – в отношение разностей. Далее вынесем за знак суммы и из знаменателя дроби период дискретизации, соединив его с соответствующими коэффициентами и перепишем функцию ошибки в дискретном виде, независимо от непрерывного времени (без T под знаком функции). Уравнение примет
следующий вид: |
|
И |
||
n 1 |
K D |
|||
K P SВХ (n) K I T SВХ (i) |
SВХ (n) SВХ (n 1) |
|
||
|
||||
i 0 |
T |
|
||
n 1 |
SВЫХ (n) |
K P.дискрSВХ (n) K I.дискр SВХ (i) K D.дискр SВХ (n) SВХ (n 1) |
|
i 0 |
|
52
Таким образом, соотношения между коэффициентами ПИДрегуляторов дискретного и непрерывного можно описать следующим образом:
K P.дискр K P ; K I.дискр K I T ; K D.дискр |
K D |
. |
(3) |
|
|||
С |
T |
|
|
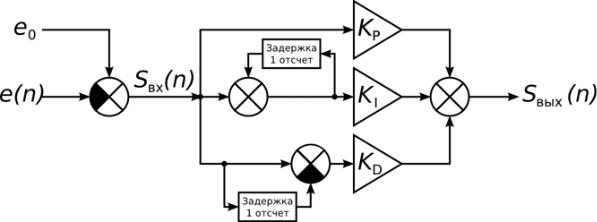
труктурная схема дискретного ПИД-регулятора показана на |
|||
рисунке 41. |
|
|
|
и |
|
|
|
б |
|
|
|
А |
|
|
|
Рисунок 41. Дискретный ПИД-регулятор |
|
||
Кроме аппаратных реализаций ПИД-регуляторы многократно запрограммированы во всевозможных библиотеках подпрограмм и функциональных блоков под различныеДтипы ПЛК и промышленных ЭВМ. Тем не менее, задача, решаемая в данной лабораторной работе, состоит в проектировании и программировании дискретного П Д- регулятора и его использовании в системе регулирования температуры, это поможет понять их принципы работы и способы применения.
Программирование ПИД-регулятораИна ПЛК
Задача. Разработать систему регулирования температуры на базе ПЛК «ОВЕН» для имитатора термокамеры, имеющегося в учебном комплекте. Не использовать ПИД-регулятор в библиотеке компонентов, разработать регулятор самостоятельно. Создать визуализацию, позволяющую видеть текущее и заданное значения температуры и график изменения температуры за последние несколько минут, настраивать коэффициенты ПИД-регулятора, а также вручную выключать и включать нагревательный элемент.
53
До этой лабораторной работы рассматривались примеры, задействующие только дискретные входы и выходы; здесь же возникла не-
обходимость использовать аналоговый вход, и для этого нужно его настроить. Для настройки входов и выходов, как было указано на стр. 17, необходимо внизу левой панели окна CoDeSys выбрать четвертую
Сслева закладку «Ресурсы», затем в иерархическом дереве выбрать «Конфигурация ПЛК». Далее на рабочем поле CoDeSys появится иерархическое дерево устройств, имеющихся в ПЛК с переменными, доступными, как входы, или выходы.
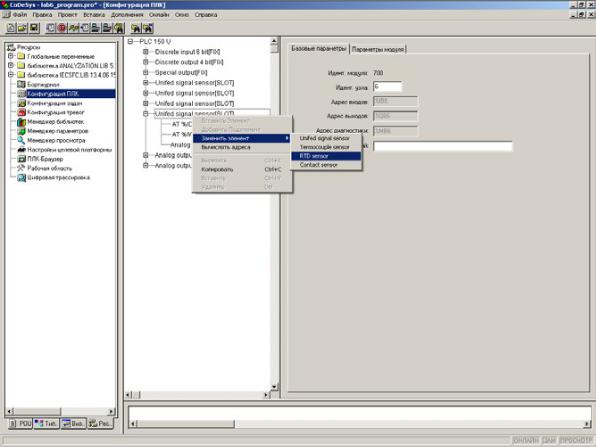
Четырем аналоговых входам ПЛК по умолчанию соответствуют пункты «Unified signal sensor», обозначающие стандартные входы по напряжен ю. Термосопротивление подключено к четвертому аналоговому входу, в сп ске он самый последний, и вход необходимо перенастро ть для ра оты с термосопротивлением. Для этого на последнем пункте «Unified signal sensor» необходимо нажать правую
кнопку « |
» в появившемся меню выбрать «Заменить элемент», |
мыши |
|
затем «RTD-sensor» (см рисунок 42). |
|
|
б |
|
А |
|
Д |
|
И |
Рисунок 42. Настройка аналогового входа для подключения термосопротивления (вместо Unified signal sensor выбрать RTD sensor)
54
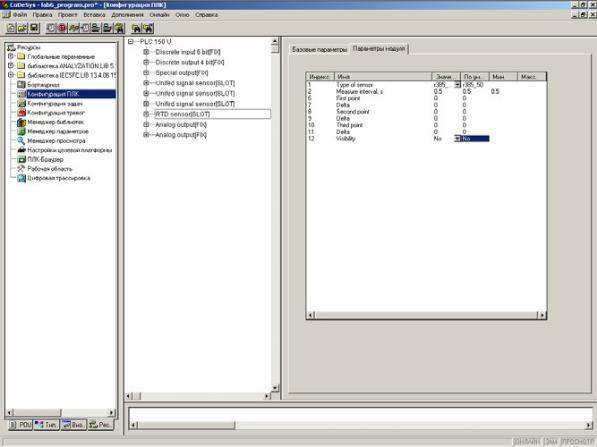
После этого надпись «Unified signal sensor» в дереве устройств сменится на надпись «RTD-sensor», и справа откроются настройки аналогового входа для подключения термосопротивления. Те значения настроечных параметров, которые являются корректными, показаны на рисунке 43. Аналоговый вход настроен, переходим к проек-
Стированию приложения.
В термокамере присутствует только дискретное управление нагревом, то есть его включение и отключение посредством релейного выхода, но, по услов ю задачи, нужно обеспечить плавную регули-
ровку нагрева. Как м образом можно решить подобную задачу, имея исходтолько д скретный вход?
Время нагрева нагревательного элемента в термокамере с 20 до 100 °C составляет около трех минут, то есть за одну секунду происходит повышенбе температуры в среднем на 0,33 °C. Нагревание происходит плавно, на не ольшом участке почти линейно, остывание про- т медленнее, чем нагревание. Можно сказать, температура термокамеры по отношению к поданному на нагревательный элемент
напряжен ю зменяется по апериодическому закону. А Д И
55