Материал: 2142
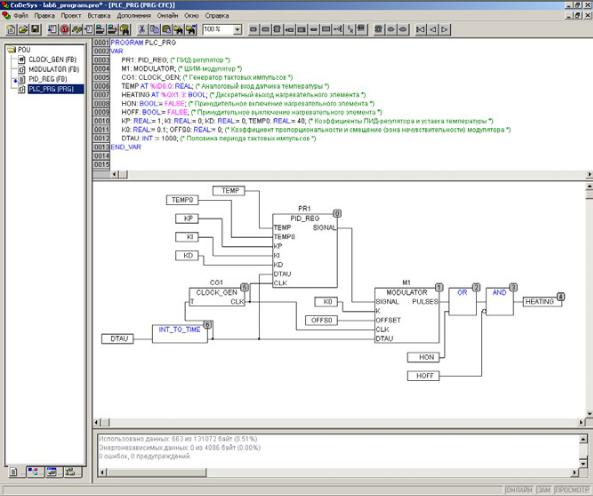
Рисунок 43. Настройка аналогового входа с термосопротивлением
В таких случаях плавный нагрев можно реализовать с помощью широтно-импульсной модуляции (ШИМ). При этом на нагревательный элемент питание необходимо подавать импульсами определенной длительности и с заданной периодичностью. необходимо, не ме-
Сняя периода импульсов, устанавливать их длительность в зависимости от требуемой температуры нагрева; при увеличении длительности импульсов температура будет расти, а при уменьшении – падать. Максимальная скорость нагрева достигается при непрерывной работе нагревателя, то есть, когда длительность импульсов равна периоду их следования, а макс мальная скорость остывания достигается при полном отключен нагревателя, то есть при длительности импульсов равной нулю.
б А Д И
Рисунок 44. Регулировка температуры, основная программа
56
Если в течение некоторого времени подавать импульсы неизменной длительности на нагреватель, в термокамере устанавливается опре-
деленная средняя температура, и если период импульсов значительно меньше времени нагревания или остывания термокамеры, то изменения температуры при подаче импульсов на нагревательный элемент можно считать незначительными. Чем выше частота следования импульсов, тем меньше погрешность регулирования температуры.
Свиде схемы, поэтому целесообразно использование языка CFC.
Будем сч тать зависимость установившейся средней температу-
ры от дл тельности мпульсов линейной.
какиевходные выходные переменные будут у функциональных блоков.
ПИД-регул рован е – задача, которую удобно представить в
На р сунке 44 представлен общий вид программы ПИДрегулирован я. В отл чие от задачи о конвейере, здесь применим ме-
Основныебфункц и, которые можно выделить в данном регуляторе: собственно, ПИДА-регулирование, преобразование выходного сигнала регулятора в частотный сигнал на коммутатор питания нагре-
тоды проект рован я «сверху вниз», то есть от общего к частному. Сперва следует определить о щий вид программы и предположить,
вательного элемента и задающие генераторы тактовых импульсов для дискретного ПИД-регулятора и для ШИМ-модулятора. Поскольку обрабатываемые сигналы имеют приблизительноПИДодну постоянную времени, целесообразно реализовать один тактовый генератор и для регулятора и для ШИМ-модулятора. Таким образом, основными функциональными блоками являются -регулятор, генератор тактовых импульсов и ШИМ-модулятор.
значение регулируемого сигнала иИего заданное значение, чтобы найти ошибку регулирования, на основе которой рассчитать воздействие;
коэффициенты регулирования: пропорциональная, интегральная и дифференциальная составляющие;
тактовые импульсы;
период следования тактовых импульсов (для расчета коэффициентов дискретного ПИД-регулятора).
Выходом ПИД-регулятора будет являться регулирующее воздействие, преобразуемое модулятором к нужному виду.
57
Для модулятора входными сигналами будут являтьсярегулирующее воздействие;
коэффициент пропорциональности и смещение сигнала, для пересчета управляющего сигнала в длину ШИМ-импульсов;
|
тактовые импульсы с генератора; |
С |
|
|
постоянная времени. |
Выходом модулятора будут импульсы, управляющие коммутацией п тан я нагревательного элемента термокамеры.
Для генератора тактовых импульсов входным сигналом будет
период тактовых |
мпульсов, а выходным сигналом – тактовые им- |
равенствами |
|
пульсы. |
|
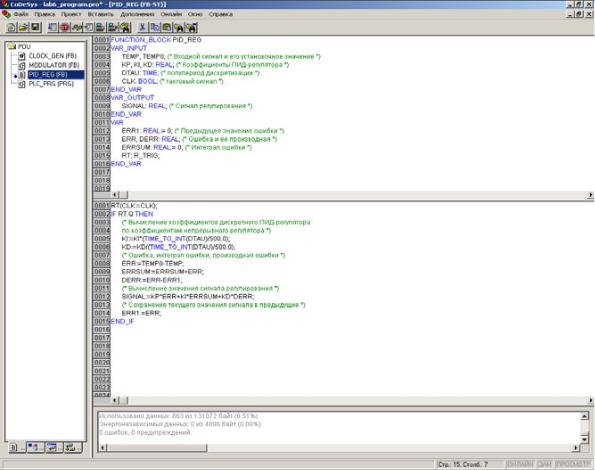
Алгор тм ПИД-регулирования можно реализовать на языке ST, |
|
он показан на |
сунке 45. Как и требуется, реализован дискретный |
б |
|
алгоритм ПИД-регул рования, коэффициенты интегрирующей и |
|
дифференц рующей составляющих пересчитываются в соответствии с (4).
А Д И
Рисунок 45. ПИД-регулятор, функциональный блок
58
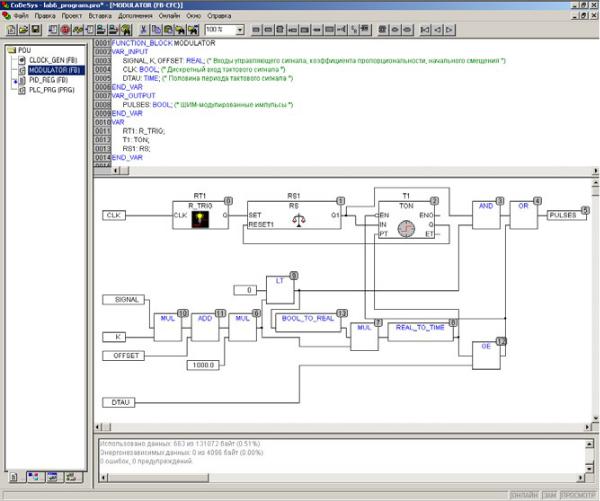
Алгоритм модулятора состоит из формирователя импульсов (см. рисунок 46) в верхней части рисунка и расчета длительности импульса в нижней части рисунка. Также из нижней части рисунка наверх поступают некоторые вспомогательные сигналы для подачи на импульсный выход постоянного высокого или низкого логического
Суровня. В алгоритме использована модель RS-триггера RS1 – бистабильная схема, устанавливающая Q1 в единицу при SET=1, RESET1=0 и сбрасывающая Q1 в ноль при SET=0; RESET1=1.
и б А Д
Рисунок 46. Модулятор, функциональныйИблок.
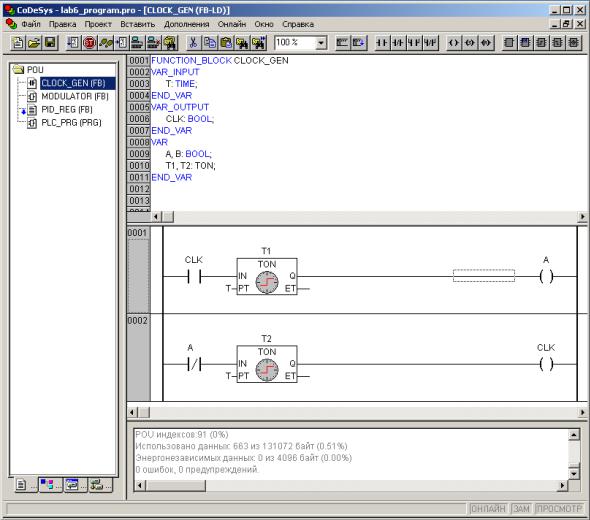
Генератор тактовых импульсов, представленный на рисунке 47, сокращен до двух строк кода и одной внутренней переменной, поскольку реализован в виде функционального блока, и все его переменные находятся в памяти. Переменная B, описанная на рисунке 47, не задействована. Время задается переменной типа TIME.
59
Общий вид визуализации показан на рисунке 48. Помимо уже применявшихся в текстовых метках шаблонов для вывода целых и вещественных чисел здесь использованы шаблоны для вывода вещественных чисел с заданной точкой. С помощью такого шаблона выводится, например, заданная и фактическая температура в термокамере:
С%3.2f означает следующее: вещественное число, ограниченное тремя знаками до запятой с точностью, ограниченной двумя знаками после запятой (в данном случае – до и после десятичной точки). Также в визуализац для наблюдения температуры за некоторый прошедший периодвремени пр менен графический тренд, с которым связаны значен я заданной фактической температуры.
б А Д И
Рисунок 47. Генератор тактовых импульсов, функциональный блок
60