Материал: 1925
моделирования. По результатам наблюдений пытаются выяснить, какие процессы управляют поведением объекта, и находят определяющие параметры модели. В обратной задаче распознавания требуется определить значения параметров модели по известному поведению системы как целого. Примеры задач распознавания: задача электроразведки (определение подземных структур при помощи измерений на поверхности), задача магнитной дефектоскопии (определение дефекта в детали, помещенной между полюсами
магнита, по возмущению магнитного поля на поверхности детали). Задача синтеза (задача математического проектирования)
заключается в построении математических моделей систем и устройств, которые должны обладать заданными техническими
характеристиками. |
В |
отличие |
от |
задач |
распознавания, |
|
|
|
|
И |
|
заключающихся в определении параметров модели, соответствующей реальному состоянию системы, в задачах синтеза отсутствует
технически наиболее приемлемый результат. К задачам синтеза относятся: синтез диаграммы направленности антенны (определение
требование единственности решения. Отсутствие единственности решения позволяет из нескольких Двозможных решений выбрать
Задача проектирования |
Ауправляющих систем является особой |
||||
областью |
математ ческого |
моделирования, |
связанной |
с |
|
автоматизированными |
бнформационными |
системами |
и |
||
автоматизированными с стемами управления. |
|
|
|||
К обратным изадачам относят задачи определения некоторых |
|||||
физических |
свойств объектов, таких как плотность, коэффициент |
||||
распределения токов, создающих заданную диаграмму направленности антенны), синтез градиентных световодов
(определение профиля функции диэлектрической проницаемости, при котором световод обладает заданными характеристиками).
теплопроводностиС, упругие модули в зависимости от координат или в виде функций других параметров. Процедура решения таких задач, состоящих в обращении причинно-следственных связей, связана с преодолением серьезных математических трудностей. Успех ее зависит как от качества и количества полученной из эксперимента информации, так и от способа ее обработки.Без умения решать прямые задачи невозможно подойти к обратным. Решение обратных задач проводится, как правило, в рамках некоторой математической модели исследуемого объекта. Оно состоит в определении либо коэффициентов дифференциальных уравнений, либо области, в которой действует оператор, либо начальных условий, либо в их сочетании.
76
Построение математической модели требует интуиции и изобретательности, глубокого понимания сути поставленной задачи и математической подготовленности исследователя. Разработка модели облегчается, если используется ЭВМ. Решение задачи по разработке математической модели в общем виде можно сформулировать как последовательность интерактивных процедур: идентификации, оценивания и диагностической проверки.
Идентификация − использование теоретических и экспериментальных данных, а также любой другой априорной информации об объекте исследования для выбора класса необходимых математических зависимостей.
Оценивание представляет собой эффективное использование
имеющихся данных для получения выводов о параметрах, определяющих адекватность исходной модели, т.е. ее соответствие имеющимся экспериментальным данным.
ствование модели. В процессе этой проверкиИнеобходимо обнаружить элементы неадекватности модели исследуемому объекту и найти пути
Диагностическая проверка включает в себя согласование мо-
дели с исходными данными, выявление недостатков и усовершен-
землеройной маш ны. При свободном резании грунта его сопротивление оказывает влияние лишь на рабочую лобовую поверхность режущего органа.
ее рационального изменения. Эффективность диагностической |
|||
|
|
|
Д |
проверки определяется обоснованным выбором методов, наиболее |
|||
чувствительных к возможным отклонениям параметров модели. |
|||
|
|
А |
|
Примеры математ ческих моделей [17]: |
|||
|
б |
|
|
Пример 1. Свободное резание грунта рабочим органом |
|||
и |
|
|
|
С |
|
|
|
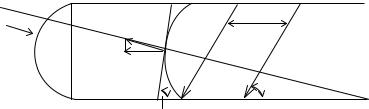
За начальную примем ту стадию процесса резания, когда режущий орган заглублен в грунт на некоторую исходную величину h и начинается поступательное перемещение его в грунте (рис. 3.9).
Пусть f (y) − уравнение лобовой поверхности режущего
инструмента, поступательная скорость перемещения которого равна ϑe и направлена горизонтально. Тогда скорость перемещения грунта в
произвольном сечении I − I по величине будет равна
ϑ =ϑe sin(arctg f |
(y)) |
(3.16) |
|
′ |
|
и направлена по нормали к рассматриваемой поверхности.
77
I |
|
Le |
|
″″ |
ϑ |
|
|
|
|
||
ΣF ″″ ″″ d5 |
|
|
|
″″ ϑe |
y y α |
|
|
″″ |
|
I |
|
|
|
|
′ |
|
|
|
|
arctg f (x) |
|
|
|
Рис. 3.9. Расчетная схема резания с произвольной |
|||||
|
поверхностью режущего инструмента |
|
|||
Считаем, |
что |
при |
резании |
в |
рассматриваемом |
полупространстве начинает распространяться плоская ударная волна, за которой грунт находится в состоянии плоского движения, описываемого в проекции на ось Ох, выбранной по нормали к поверхности ножа, уравнением
|
∂ϑ |
+ϑ |
∂ϑ |
∂P |
, |
И |
(3.17) |
|
γ |
= − |
∂x |
||||
|
∂t |
|
∂x |
|
|
||
где γ, P, ϑ − плотность, |
давлениеДи скорость частиц грунта; t − |
||||||
время. |
и |
|
|
|
|
|
|
|
Грунт − пластически сжимаемаяАсреда, меняет свою плотность |
||||||
только на ударной волнеб, поэтому за ней грунт принимается несжимаемым, то есть плотность частиц грунта за волной одинакова.
В этом случае скорость частиц грунта, движущихся по нормали к поверхности ножа (вдоль оси Ох), будет функцией только времени,
поэтому |
С |
∂ϑ |
|
|
|
= 0. |
(3.18) |
||
|
∂x |
|||
|
|
|
|
Пусть L(t) − величина перемещения режущего органа в грунте в
направлении, нормальном к его лобовой поверхности. Тогда можно записать
|
∂V |
|
|
V (t)= L, а |
∂x |
= L . |
(3.19) |
78

С учетом выражений (3.18) и (3.19) уравнение (3.17) примет
вид
|
∂P |
(3.20) |
γL = − |
∂x . |
Проинтегрировав это уравнение по переменной х, получим
|
(3.21) |
P = −γLx + C , |
где С − постоянная интегрирования.
Поскольку грунт в области возмущённого давления не только несжимаем, но и неоднороден, т.е. γ =γ(x), плотность
является функцией координаты х, запишем выражение величины |
|||||||
|
|
|
|
|
И |
|
|
давления грунта на внешней границе о бласти х*: |
|
||||||
|
|
|
Д |
(3.22) |
|||
|
P* = −γ Lx * +C . |
|
|
||||
Из основных законов механики, записанных для параметров |
|||||||
движения на границе области, следует, что |
|
||||||
|
б |
|
|
|
|
|
|
|
P* = |
γ0 L2 |
; x = |
L |
; γ0 = bγ . |
(3.23) |
|
и |
|
|
|
|
|
||
С |
|
1А−b 1−b |
|
||||
На лобовой поверхности движущегося режущего органа |
|||||||
формула (3.17) имеет в д |
|
|
|
|
|
|
|
|
|
P |
|
|
|
(3.24) |
|
|
|
= −γLL + C . |
|||||
Исключив постоянную интегрирования из уравнений (3. 22) и (3.24) и воспользовавшись соотношениями (3. 23), с учетом того, что b =b(y) является функцией переменной у, получим величину
давления на элементарной площадке лобовой поверхности ножа при x = L, 0 ≤ y ≤ (см. рис. 3.9):
P = |
γ0 (L2 + LL). |
(3.25) |
|
1 −b(y) |
|
79
Формула (3.25) является выражением величины давления грунта на лобовую поверхность режущего органа в
рассматриваемом произвольном сечении I − I (см. рис. 3.9). Тогда если γ0 = γ0 (y) и P = P(y) – известные функции, то
горизонтальная и вертикальная составляющие сопротивления
резанию FГ |
и FВ |
соответственно определяются: |
|
|
|
|
|
|||||||||||||
|
|
|
FГ |
= |
h cos ecα |
|
|
|
|
′ |
|
|
|
|
|
|
(3.26) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
∫P(y)sin(arctg f (y))dS ; |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FB = |
h cos ecα |
|
|
|
′ |
|
|
|
|
|
|
(3.27) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
∫P(y)cos(arctg f (y))dS , |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где α − угол резания; dS = |
1 +[f |
′ |
2 |
|
|
|
|
|
|
|
|
|
||||||||
|
(y)] dy . |
|
|
|
|
|
|
|
|
|||||||||||
Или в развернутом виде с учетом ширины резания В получим |
||||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ И′ |
2 |
|
|
|
|||||
|
|
L |
+ LL |
|
|
А |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
FГ = B |
|
|
|
|
|
|
(y)) |
1+[f |
(y)] |
dy ; |
(3.28) |
|||||||||
1−b(L)∫γ0 (y)sin |
(arctg f |
|||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||
|
|
L |
+ LL |
|
|
|
|
|
1+[f |
|
|
|
|
|||||||
FB = B |
|
|
|
|
|
|
|
|
|
|
|
′ |
′ |
|
dy . |
(3.29) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1−b(L)∫γ0 (y)cos(arctg f (y)) |
(y)] |
|||||||||||||||||||
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Следует замет ть, что величина ограничена некоторым |
||||||||||||||||||||
значением |
С |
б |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
L ≤ Lск . |
|
|
|
|
|
|
|
(3.30) |
||
Здесь |
Lск |
такое |
|
значение |
L, при котором |
Р |
|
достигает |
||||||||||||
максимального значения и происходят скол и сдвиг грунтовой массы. При отделении грунта от массива в виде сливной стружки также происходит множество микросколов, но вследствие того, что скорость деформации превосходит скорость разрушения грунта, грунт вновь уплотняется. Формула (3.25) фактически описывает изменение величины давления грунта на лобовую поверхность для произвольного фрагмента процесса резания, определяемого двумя последовательными сколами.
80