Материал: 1831
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Ynp(i,k)=8,0 УЛЕ - при (49<i<51) и (50<k<100);
Ynp(i,k)=8,0 УЛЕ - при (79</<81) и (1<k<50);
Ynp(i,k)=0,0 УЛЕ - в остальных случаях.
Груз в форме цилиндра с габаритными размерами: габаритный диаметр 0,5 УЛЕ, и высота 2,0 УЛЕ, был представлен в виде набо ра точек (сг=12) на поверхности объемного те ла с координатами в УЛЕ: {Rig}={[0,25;0;1;1]; [0,25;0;0;1]; [0,25;0;-1;1]; [-0,25;0;1;1]; [- 0,25;0;0;1]; [-0,25;0;-1;1]; [0;0,25;1;1]; [0;0,25;0;1]; [0;0,25;-1;1]; [0;-0,25;1;1]; [0; - 0,25;0;1]; [0;-0,25;-1;1]}.
Для каждой траектории объекта, найденной в отдельном независимом эксперименте (рису¬ нок 2),определялись собственные значения целевой функции (L до локальной оптимиза ции, L* после локальной оптимизации), инфор мационной длины исследуемого алгоритма Me и времени поиска 7"р.
Проведение вычислительных эксперимен¬ тов на тестовом примере с детерминирован¬ ным расположением препятствий позволило обосновать рациональные значения основных внутренних параметров соответствующих ал¬ горитмов с элементами вероятностного выбора для решения поставленной задачи и для по¬ следующего сравнения с детерминированными алгоритмами. Ввиду ограниченного объема статьи результаты вычислительных экспери¬ ментов на тестовом примере с детерминиро¬ ванным расположением препятствий не приво¬ дятся.
Была проведена серия из 10000 компью¬ терных экспериментов, моделирующих про¬ цесс поиска оптимальной траектории переме¬ щения объекта в среде с полидистантными поверхностями, построенными вокруг реаль¬ ных поверхностей препятствий [Ynp], сформи¬ рованных случайным образом из сочетания нескольких параллелепипедов, каждый из ко¬ торых имел случайные размеры.
Число параллелепипедов n в каждом экс¬ перименте генерировалось по равномерному закону распределения случайной величины в интервале от 1 до 15. Размеры каждого парал¬ лелепипеда формировались в пределах (xxyxz) от 0x0x0 УЛЕ до 4x5x4 УЛЕ также по равномерному закону распределения. Допус¬ калось перекрытие объемов и поверхностей параллелепипедов при их наложении.
Для каждого эксперимента определялись пу¬ тем непосредственных вычислительных измере¬ ний, реализованных программно, значения 7p и
10
б)
Рис. 2. Примеры найденной алгоритмом на основе генетического подхода (№ 3)
траектории: а) до локальной оптимизации (L); б) после локальной оптимизации (L*)
Me, и рассчитывалось по результатам вычисли тельных измерений значение 8Lycn:
8Lyci= ^*^усл)-100%,где Lycn - условный глобаль¬ ный оптимум решения задачи, определяемый как минимальное значение из множества значений целевой функции, полученных при использова¬ нии различных методик, но для одних и тех же численных значений исходных данных задачи
[Yn p]:
L^minUL*)}, ie [1; 5],где i - номер применяе¬ мой методики на основе: 1 - направленного волнового алгоритма; 2 - алгоритма роевого интеллекта; 3 - генетического подхода; 4 - ал¬ горитма декомпозиции линейных и угловых координат; 5 - алгоритма вероятностной до¬ рожной карты.
Некоторые результаты сравнительного анализа методик и алгоритмов по принятым критериям оценки эффективности приведены на рисунке 3. Исследования проводились на программных реализациях методик и алгорит-
Вестник СибАДИ, выпуск 1 (19), 2011 |
71 |
PDF created with pdfFactory Pro trial version www.pdffactory.com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
мов в среде MS Visual C++ на ПК средней про изводительности (AMD Athlon 64 X2 Dual Core Processor 5600+ 2.90 GHz, RAM 4,00 ГБ).
Поскольку использовалось 3 самостоятель ных критерия оценки алгоритмов и методик, ре-
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24 |
097 |
||||
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
— |
|
|
|
|
|
|
|
23,196 |
|
|
|
|
|
|
|
2 4 |
0 9 7 |
|
|||||||
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
4 |
М |
|
|
|
|
|
!' 1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
~ 9 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
5 |
~2,611 |
|
|
|
з),31 |
1 = 0 , 7 0 2 — |
2,93 |
^ 1 , 7 0 2 = |
|||||||||||||||
|
|
|
|||||||||||||||||||||
0 |
- |
1 |
— |
1 |
—• |
1 |
|
•=• |
|
|
|
1• |
|
||||||||||
Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24 |
097 |
|||
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
— |
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
? 13 1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
2 611 |
|
|
3 31| |
|
0 |
|
702 |
|
|
|
|
2,93 |
J 1 , 7 0 2 = |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
0 |
|
- 1 — 1 —• |
|
|
|
|
|
|
|
• |
г — О - |
||||||||||||
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
5 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24 |
097 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
23,196 |
|
|
|
|
|
|
2 4 , 0 9 7 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
__ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ 9 |
Л 1 |
1 |
|
|
|
?' 'З 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2,611 |
|
3,31 |
|—0 |
|
7 0 2 — |
2,93 |
J 1 , 7 0 2 = |
|||||||||||||||
0 |
|
|
- |
1 |
— |
1 |
—• |
I |
1 |
— |
1 |
|
|
|
1• |
1 = 1 — 1 = |
|||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
5 |
||
Рис. 3. Результаты сравнительного анализа мето дик и алгоритмов по принятым критериям оценки эффективности: 1 - направленный волновой алго ритм; 2 - алгоритм роевого интеллекта; 3 - алго ритм на основе генетического подхода; 4 - алго ритм декомпозиции линейных и угловых координат; 5 - алгоритм вероятностной дорожной карты; Ш - математическое ожидание значения времени рас¬ четов распараллеленных алгоритмов 2 и 4, верх¬ ний пределДля этого было проведено масштаби рование отображаемых результатов экспери ментов по максимальным полученным значе-
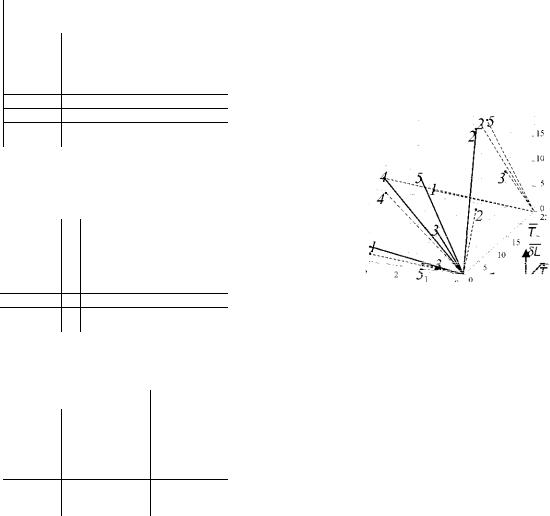
зультаты анализа были интерпретированы гра¬ фически в удобном для восприятия и нагляд¬ ном виде, как совокупность векторов в трехмер¬ ном пространстве координат [ Тр Me 8Lycn ].
ниям каждого критерия. Векторное представ¬ ление разработанных алгоритмов и методик по принятым критериям эффективности как компонентам векторов, а также проекции векто¬ ров на три плоскости ([ Тр Me], [ Тр дЕусл ], [Me
8L ]) приведены на рисунке 4.
|
2 |
сЛО |
d I |
|
|
|
|
|
20- |
|
|
5 |
4 |
|
3/ |
|
|
|
|
|
'У |
|
|
|
1 |
усл |
|
|
Мб
Рис. 4. Векторное представление критериев эффективности
разработанных алгоритмов и методик
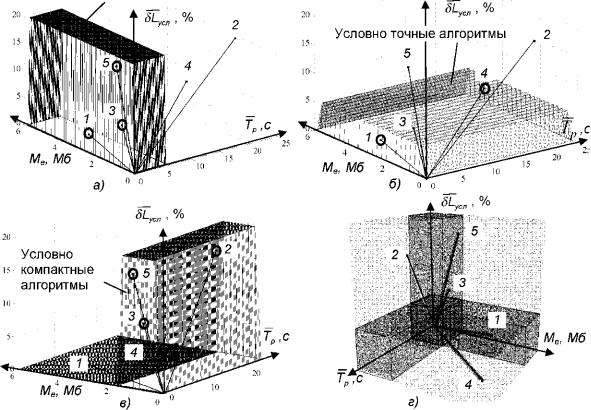
При сравнении алгоритмов по принятым критериям оценки эффективности, в трех¬ мерном пространстве положений векторного критерия эффективности могут быть выделе¬ ны отдельные области, соответствующие оп тимальному значению какого-либо одного, двух или всех трех компонент вектора, определяе¬ мые условиями вида:
Т р < ( Т р ) m a x ; Me<(Me)max; Щсл < ( Щсл ) m a x ^
(Тр )max; (Me)max; ( d ^ * , )max - максимальные пре¬ дельно допустимые (заданные) значения кри¬
териев.
Соответственно можно выделить область условно быстрых алгоритмов, область ус¬ ловно точных алгоритмов и область условно компактных (т.е. занимающих малый объем в памяти ПК) алгоритмов (рисунок 5, а, б, в).
72 |
Вестник СибАДИ, выпуск 1 (19), 2011 |
PDF created with pdfFactory Pro trial version www.pdffactory.com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Условно быстрые алгоритмы
Рис. 5. Области условно быстрых (а), условно точных (б), условно компактных (в) алгоритмов и их пересе чения (г): 0 - последовательные алгоритмы, попадающие в соответствующую
область оптимальности
Вкачестве примера, при (Тр )max=5 с;
(Me)max=2 Мб; (дЕусл )max=5% К условно быстрым
алгоритмам могут быть отнесены 1, 3 и 5 алго ритмы, к условно точным 1 и 4 алгоритмы, к условно компактным 2, 3 и 5 алгоритмы. В слу чае распараллеливания алгоритмов 2 и 4, они также попадают в область условно быстрых.
Заключение
Ни один из разработанных алгоритмов не удовлетворяет условию оптимальности по всем трем критериям одновременно, т.е. не входит в область пересечения условно быст¬ рых, условно точных и условно компактных ал¬ горитмов (см. рисунок 5, г), однако отдельные алгоритмы оптимальны по двум критериям. В частности, алгоритмы 3 и 5 одновременно бы¬ стрые и компактные, причем алгоритм 3 в большей степени. Алгоритмы 1 и распаралле ленный 7 одновременно быстрые и точные, причем алгоритм 1 в большей степени.
Результаты сравнения алгоритмов под тверждают предположение о том, что сущест¬ вует взаимосвязь между оптимальностью ал¬ горитма, которая в данном случае выражается
его точностью 8 Lу с л , и сложностью алгоритма (временной или пространственной), которая в
данном случае выражается через критерии Тр
и Me . Т.е. невозможно упростить алгоритм (временную либо пространственную слож¬ ность, которые также взаимосвязаны между собой), не жертвуя при этом его оптимально¬ стью, что хорошо иллюстрируется алгоритмом на основе генетического подхода (№ 3).
Учитывая, что при современном уровне развития компьютерной техники требование компактности не является критичным в диапа¬ зоне значений всех рассматриваемых алго¬ ритмов (не более 6 Мб), следует отметить на¬ правленный волновой алгоритм (№ 1) как наи¬ более точный и в то же время достаточно бы¬ стрый. В пользу его перспективности для ре¬ шения поставленной задачи говорит и тот факт, что это детерминированный алгоритм в отличие от всех остальных, кроме алгоритма № 7. Этот алгоритм находит единственно воз¬ можное и постоянное решение задачи при од¬ них и тех же численных значениях исходных данных.
Вестник СибАДИ, выпуск 1 (19), 2011 |
73 |
PDF created with pdfFactory Pro trial version www. pdtTactorv.com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Библиографический список
1. Щербаков, В.С. Использование алгоритмов поиска пути перемещения груза автокраном на гра фах / В.С. Щербаков, М.С. Корытов // Вестник Воро нежского государственного технического университе та, 2009. - Т.5. - № 5. - С. 37-41.
2.Щербаков, В.С. Поиск оптимальной траекто¬ рии груза, перемещаемого автокраном, в среде с произвольными препятствиями, с учетом координат угловой ориентации в трехмерном пространстве / В.С. Щербаков, М.С. Корытов // Вестник Брянского государственного технического университета, 2009. -
№4 (24). - С. 48-51.
3.Щербаков, В.С. Методика поиска субопти¬ мальной траектории движения объекта в трехмерной среде с произвольными препятствиями с учетом ко¬ ординат угловой ориентации / В.С. Щербаков, М.С. Корытов // Вестник СибАДИ, 2009. - Вып. 4 (14). - С. 5-10.
4.Корытов, М.С. Декомпозиция обобщенных ко¬ ординат при решении задач оптимизации траектории перемещения груза // Вестник МАДИ (ГТУ), 2010. - Вып. 3(22). - С. 32-35.
5.Щербаков, В.С. Использование генетических алгоритмов для поиска оптимальной траектории пе¬ ремещения груза / В.С. Щербаков, М.С. Корытов // Вестник КГТУ им. А.Н. Туполева, 2010. - № 3. - С. 155-158.
6.Щербаков, В.С. Об одной модификации алго¬ ритма муравьиных колоний для планирования траек¬ тории перемещения груза в пространстве с препятст¬ виями с учетом угловой ориентации / В.С. Щербаков, М.С. Корытов // Известия высших учебных заведений. Поволжский регион. Технические науки. - 2010. - №
3.- С. 143-151.
9.Щербаков, В.С. Влияние стохастических па¬ раметров пространства с препятствиями на длину траектории груза, перемещаемого грузоподъемным краном / В.С. Щербаков, М.С. Корытов // Вестник СибАДИ, 2009. - Вып. 3 (13). - С. 13-17.
10.Корытов, М.С. Использование полидистант¬ ных поверхностей в задаче поиска пути перемещения груза в среде с препятствиями // Материалы 64-й на¬ учно-технической конференции ГОУ «СибАДИ». - Омск: СибАДИ, 2010. - Кн. 1. - С. 302-306.
A comparative analysis of scheduling algorithms trajectory of an object given its angular coordinates in three-dimensional space with obstacles
V.S. Shcherbakov, M.S. Korytov
Some results of comparative analysis of algo rithms for planning optimal trajectories move an object of arbitrary shape, given its angular orien¬ tation in three-dimensional space with arbitrary obstacles, given in a discrete form.
Щербаков Виталий Сергеевич - доктор техн. наук, профессор, декан факультета «Нефтега зовая и строительная техника» Сибирской госу дарственной автомобильно-дорожной академии. Основное направление научных исследований -
совершенствование |
систем |
управления строи |
|||||
тельных и |
дорожных |
машин, |
общее |
количество |
|||
публикаций |
- более |
200, адрес |
электронной |
поч |
|||
ты - sherbakov |
vs@sibadi.org. |
|
|
|
|
||
Корытов |
Михаил |
Сергеевич - |
канд. |
техн. |
на |
||
7.Кормен, Томас X. Алгоритмы: построение и ук, доцент, докторант Сибирской государствен
анализ: пер. с англ. / Томас X. Кормен, Чарльз И. Лей- |
ной автомобильно-дорожной академии. |
Основное |
|||
зерсон, |
Рональд Л. Ривест, |
Клиффорд Штайн. - М.: |
направление научных исследований - автомати |
||
Изд. дом «Вильямс», 2005. - |
1296 с. |
зация планирования рабочих процессов мобильных |
|||
8. |
Рассел, С. Искусственный интеллект: совре¬ |
грузоподъемных |
машин, общее количество публи |
||
менный подход: пер. с англ. / Стюарт Рассел, Питер |
каций - более |
80, адрес электронной |
почты - |
||
Норвиг. - М.: Изд. дом «Вильямс», 2006. - 1408 с. |
kms142@mail.ru. |
|
|
||
74 |
Вестник СибАДИ, выпуск 1 (19), 2011 |
PDF created with pdfFactory Pro trial version www. pdffactory. com
РАЗДЕЛ IV
ЭКОНОМИКА И УПРАВЛЕНИЕ
УДК 69.003: 65.014(07)
ВЗАИМОДЕЙСТВИЕ ЭЛЕМЕНТОВ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТАМИ И КОМПЛЕКСАМИ НЕДВИЖИМОСТИ
А.Ю. Шонин, А.Н. Никоненко
Аннотация. |
|
Рассмотрен |
процесс |
управления |
объектами |
недвижимости |
с |
||||||||||||||
точки зрения |
системного |
подхода. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Ключевые |
слова: |
недвижимость, |
система |
управления |
недвижимостью, |
эле |
|||||||||||||||
менты |
системы |
управления. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
При любом общественном устройстве осо |
оружения смешанного назначения и др.); |
|
|
||||||||||||||||||
бое место в системе общественных отношений |
2) стоимостные цели - ожидаемые в бу¬ |
||||||||||||||||||||
занимает недвижимое имущество, с функцио |
дущем |
финансовые |
|
результаты |
(прибыль, |
||||||||||||||||
нированием которого так или иначе связаны |
ценность капитала, поток денежных поступле¬ |
||||||||||||||||||||
жизнь и деятельность людей во всех сферах |
ний и др.); |
|
|
|
|
|
|
|
|
|
|
||||||||||
бизнеса, управления и организации. Именно |
3) социальные цели - социальная обязан¬ |
||||||||||||||||||||
недвижимость |
формирует |
центральное |
звено |
ность |
субъекта |
предпринимательской |
|
дея¬ |
|||||||||||||
всей системы рыночных отношений. Объекты |
тельности перед обществом (разработка про¬ |
||||||||||||||||||||
недвижимости не только важнейший товар, |
екта и его реализация в соответствии с соци¬ |
||||||||||||||||||||
удовлетворяющий |
различные потребности |
лю¬ |
альной и исторической установкой общества, |
||||||||||||||||||
дей, но одновременно и капитал в вещной фор¬ |
задачи по защите окружающей среды, оплата |
||||||||||||||||||||
ме, приносящий доход. |
|
|
|
|
|
налогов и др.). |
|
|
|
|
|
|
|
|
|||||||
Недвижимость - основа национального бо¬ |
Управление |
недвижимостью |
включает: |
||||||||||||||||||
гатства страны, имеющая по числу собственни¬ |
систему законодательного |
и |
нормативного |
||||||||||||||||||
ков массовый характер. Поэтому знание эконо¬ |
регламентирования |
и |
контроля |
поведения |
|||||||||||||||||
мики недвижимости необходимо для успешной |
всех субъектов рынка недвижимости, осуще¬ |
||||||||||||||||||||
предпринимательской |
деятельности |
в |
различ¬ |
ствляемую |
|
государственными |
органами; |
||||||||||||||
ных видах бизнеса, а также в жизни любой се¬ |
оформление |
и |
регистрацию |
правоустанав¬ |
|||||||||||||||||
мьи и отдельно взятых граждан, поскольку соб¬ |
ливающих и других документов на объекты |
||||||||||||||||||||
ственность на недвижимость - первичная осно¬ |
недвижимости; |
управление |
объектами |
не¬ |
|||||||||||||||||
ва свободы, независимости и достойного суще¬ |
движимости в интересах собственника. |
|
|
||||||||||||||||||
ствования всех людей. |
|
|
|
|
|
|
Управление |
недвижимостью |
является |
||||||||||||
Управление |
недвижимостью |
определяется |
процессом |
постоянным и |
коммуникацион¬ |
||||||||||||||||
как процесс решения проблем по достижению |
ным, его можно представить как сочетание |
||||||||||||||||||||
поставленных целей. Важнейшими целями эко¬ |
следующих |
|
|
подсистем: |
|
субъектно- |
|||||||||||||||
номики недвижимости являются: |
|
|
|
|
объектной, |
функциональной |
и |
ресурсной |
|||||||||||||
1) потребительские цели - достижение оп¬ |
(рис. 1). Управление недвижимостью реализу¬ |
||||||||||||||||||||
ределенных |
материальных |
результатов |
по¬ |
ется путем формирования объекта управления, |
|||||||||||||||||
средством реализации производственных задач |
представляющего |
комплекс технологически |
или |
||||||||||||||||||
(жилищное |
строительство, |
реконструкция |
зда¬ |
функционально |
связанного |
имущества, |
вклю¬ |
||||||||||||||
ний и сооружений, коммерческая недвижимость, |
чающего земельный участок, здания, сооружения |
||||||||||||||||||||
недвижимость для временного проживания, со- |
и их части. |
|
|
|
|
|
|
|
|
|
|
||||||||||
Вестник СибАДИ, выпуск 1 (19), 2011 |
75 |
PDF created with pdfFactory Pro trial version www. pdffactory. com