Материал: 1831
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
|
Таблица 1 - Классификация грунтов |
|
|
|
|
|
|
|
I |
|
|
|
E(i - m) |
~ |
|
|
|
(6) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и, = |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Категория |
|
Число |
|
|
Примечание |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
грунта |
|
ударов |
С |
|
|
|
|
|
|
где Е - модуль |
|
нормальной упругости |
грунта; |
|||||||||||||||||||||
|
|
I |
|
|
|
1...4 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
m - коэффициент поперечной упругости |
|
грун¬ |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Немерзлые |
|
|
||||||||||||||||||||||
|
|
II |
|
|
|
5...8 |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
та; р - плотность |
грунта. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
грунты |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
III |
|
|
|
9...16 |
|
|
|
|
|
Для |
определения основных |
|
параметров |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
IV |
|
|
|
17...35 |
|
|
|
|
|
|
рабочего органа ударного действия (требуе¬ |
||||||||||||||||||||||
|
|
V |
|
|
|
36...70 |
|
|
|
|
|
|
мой для разрушения |
|
грунта |
энергии удара AP |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
Мерзлые |
|
глубины внедрения инструмента |
5вн , |
време¬ |
||||||||||||||||||||||
|
|
VI |
|
|
|
71...140 |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
грунты |
|
ни соударения |
|
инструмента |
с грунтом |
- |
вре¬ |
|||||||||||||||
|
|
VII |
|
|
|
141...280 |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
мени удара |
tyd |
|
, |
силы сопротивления |
грунта |
|||||||||||||||||||
|
|
VIII |
|
|
281...560 |
|
|
|
|
|
|
разрушению |
Nc |
|
) |
применяются |
следующие |
||||||||||||||||||
|
При |
определении |
энергии, |
необходимой |
формулы [2]: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
для разрушения грунта, принимаются сле |
энергия удара |
Л |
|
=-вН |
|
|
|
1—S-C2 ; |
|
(7) |
|||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||
дующие допущения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
2V,kaE |
|
|
|
|
|||||||||||
|
- вся кинетическая энергия бойка гидро |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
молота передается инструменту; |
|
|
|
|
глубина внедрения |
d |
— р |
1 |
a 2 |
; |
(8) |
||||||||||||||||||||||||
|
- энергия, отраженная от грунта в инстру¬ |
|
|
|
|
|
|
|
|
|
|
|
|
SU1kSC2 |
|
|
|||||||||||||||||||
мент, |
не учитывается; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
2Лт ka E |
|
|
|||||||||||
|
- тепловые потери в грунте не учитываются; |
|
|
время удара |
|
tуд |
|
|
(9) |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
- потенциальная энергия упругого дефор¬ |
|
|
|
|
SU1kSC |
|
2 |
|
||||||||||||||||||||||||||
мирования |
переходит |
в |
энергию |
трещинооб- |
где S - площадь контакта инструмента с грун¬ |
||||||||||||||||||||||||||||||
разования |
скалываемого тела. |
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
том; |
Ui |
- скорость |
распространения продоль¬ |
||||||||||||||||||||||||||||
|
При |
таких |
допущениях |
энергия, затрачи¬ |
|||||||||||||||||||||||||||||||
|
ной |
волны; |
E - динамический мо дуль упруго |
||||||||||||||||||||||||||||||||
ваемая |
на |
разрушение грунта, |
определяется |
||||||||||||||||||||||||||||||||
сти |
грунта; |
ka |
|
- |
безразмерный коэффициент, |
||||||||||||||||||||||||||||||
по формуле [1]: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
учитывающий |
|
угол |
|
заострения |
инструмента, |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
Лр |
|
= |
Vp |
j |
s (e )de |
|
|
|
|
ka > |
1,0; |
V1 |
- |
скорость удара |
инструмента |
||||||||||||||||
|
|
|
|
|
|
|
(5) |
(бойка) |
о грунт; |
kS |
- коэффициент, |
kS = k02kC2km |
|||||||||||||||||||||||
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
, здесь k0 - безразмерный коэффициент, k0 = |
|||||||||||||||||||
|
где |
AP |
- энергия |
разрушения |
грунта; VP - |
1,36...1,60; kc |
|
- |
коэффициент, предложенный |
||||||||||||||||||||||||||
объем |
разрушенной |
зоны, |
|
VP |
= |
SL, |
L=(U1- |
проф. И.А.Недорезовым, kc = 106/30; km - без |
|||||||||||||||||||||||||||
Vi)tyd, |
здесь S - площадь контакта инструмен¬ |
размерный коэффициент, km = 1-2/j/(1-m), |
|||||||||||||||||||||||||||||||||
та с разрушаемым грунтом; L - длина сжатой |
здесь m - коэффициент поперечной упругости |
||||||||||||||||||||||||||||||||||
зоны; U1 - скорость распространения про |
грунта (Пуассона); C - число ударов плотно¬ |
||||||||||||||||||||||||||||||||||
дольной |
волны; |
V1 |
- скорость |
удара |
инстру |
мера ДорНИИ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
мента о грунт; |
tyd |
- время удара; а(е) |
- напря |
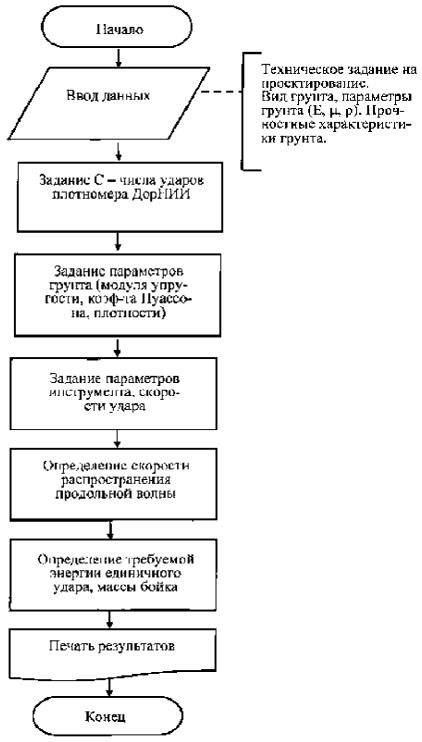
Алгоритм |
|
расчета |
активного |
рабочего |
|||||||||||||||||||||||||||
жение на поверхности грунта; г - деформация |
|
||||||||||||||||||||||||||||||||||
органа |
для |
разрушения |
грунта |
представлен |
|||||||||||||||||||||||||||||||
грунта. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
на рис. 1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Скорость |
распространения |
|
продольных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
упругих волн равна [5]:
56
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Рис. 1. Алгоритм расчета активного рабочего органа
Вестник СибАДИ, выпуск 1 (19), 2011 |
57 |
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
По |
формуле |
(7) |
находится требуемая |
|
2T_ |
|
(11) |
||
энергия единичного удара гидромолота Т, не¬ |
|
m = |
|
||||||
|
|
|
|||||||
обходимая для внедрения инструмента на |
Программное |
обеспечение |
расчета |
актив¬ |
|||||
глубину |
h при заданной скорости удара |
V1 , |
|||||||
т. е. |
|
|
|
|
|
ного рабочего органа для разрушения грунта |
|||
|
|
hSU,ks |
C2 |
|
разработано на языке программирования VBA |
||||
|
T |
(10) |
для персональных компьютеров. |
|
|||||
|
|
|
|
|
|||||
|
|
2V,kaE |
. |
|
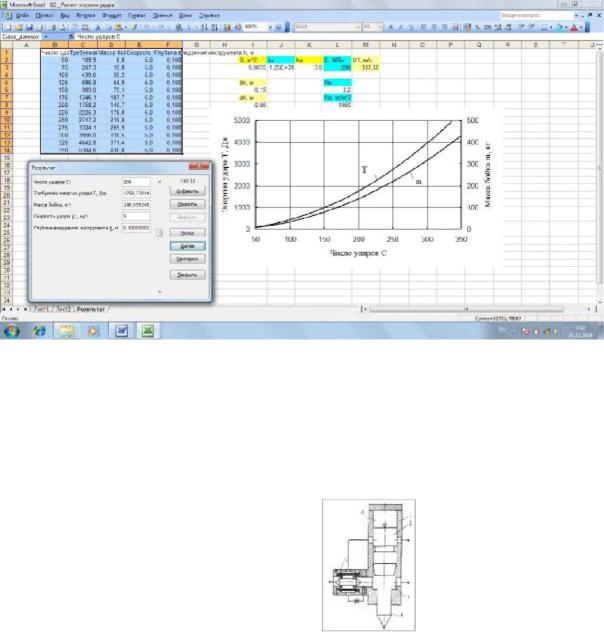
Фрагменты |
результатов |
расчетов |
пара¬ |
|
Определив энергию |
единичного удара Т |
метров активного рабочего органа показаны |
|||||||
по формуле (10), |
находят |
массу бойка |
m из |
на рис. 2, 3. |
|
|
|
||
|
|
|
|
||||||
выражения
Рис. 2. Фрагмент расчета параметров активного рабочего органа
|
|
|
|
'li UUMIU |
|
П LfLUJ-при rp-гь TJ. |
|
||
Чн |
ил у ? ц к * И |
?нО-ди-:рлтй.Л1 Е Л1П* |
O i № ! T i n t . |
|
|
||||
TLlLLHL'-.L. JJ|ih IJ |
EUj .• ф-ф Н ЩICUI |
|
||
ни |
j |
I U.2 |
Пу-ысэн-а e ^ h i a |
|
J |
lyfJ |
|
|
|
r v p i U h I ! W
Рис. 3. Рабочее окно определения параметров активного рабочего органа (мерзлый грунт, С=250)
58 |
Вестник СибАДИ, выпуск 1 (19), 2011 |
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Выводы
Разработан алгоритм и составлена програм¬ ма, позволяющая определять основные пара¬ метры активного рабочего органа при разруше¬ нии грунтов: требуемую энергию единичного удара, массу бойка, глубину внедрения инстру¬ мента в грунт при разрушении мерзлого и проч¬ ного грунта.
Библиографический список
1. Ветров Ю.А., Баладинский В.Л. Машины для специальных земляных работ / Ю.А.Ветров, В.Л. Баладинский. - Киев: Вища школа, 1981. - 192 с.
2.Галдин Н.С. Многоцелевые гидроударные рабо чие органы дорожно-строительных машин: Моногра фия / Н. С. Галдин. - Омск: Изд-во СибАДИ, 2005. - 223 с.
3.Недорезов И.А. Интенсификация рабочих орга нов землеройных машин / И. А. Недорезов. - М.: М А Д И , 1979.- 51 с.
4.Теоретические основы создания гидроимпульс¬ ных систем ударных органов машин /А.С.Сагинов, ИАЯнцен, Д.Н. Ешуткин, Г.Г.Пивень. Алма-Ата: Наука, 1985. - 256 с.
5.Цытович Н.А. Механика грунтов / Н.А.Цытович. - М.: Высш. школа, 1979. - 272 с..
УДК 004.021 : 621.9.02
Algorithm and some results of calculation of key parameters of working body for
destruction of a ground
V.N.Galdin
The algorithm and the software are a basis of designing of active working bodies of the roadbuilding machines intended for destruction strong and frozen grounds. Some results of calculation of key parameters (energy of individual impact, weights it is brisk) working body for destruction of a ground are resulted.
Галдин Владимир Николаевич - инженер, соиска тель Сибирской государственной автомобильнодорожной академии. Основное направление научных исследований - автоматизированное проектирова ние систем. Имеет 25 опубликованных работ.
АВТОМАТИЗИРОВАННЫЙ СПОСОБ ОЦЕНКИ ВЗАИМНОГОПОЛОЖЕНИЯ ФРАГМЕНТОВ ИЗОБРАЖЕНИЙ НА ЧЕРТЕЖАХ МЕТАЛЛОРЕЖУЩЕГО ИНСТРУМЕНТА
Ф. Н. Притыкин, Е. Е. Шмуленкова
Аннотация. |
В статье рассматривается автоматизированный способ определе |
||
ния взаимного |
расположения |
объектов на чертеже металлорежущего инструмента. |
|
При этом чертеж создан на основе параметрической 3-D модели. Для анализа гео |
|||
метрических объектов применяется теория множеств. |
|||
Ключевые |
слова: чертеж металлорежущего |
инструмента, теория множеств, |
|
автоматизированный способ |
оценки графических |
объектов. |
|
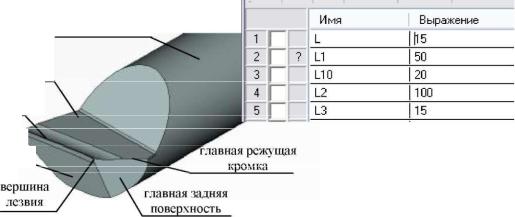
В настоящее время для создания различных графических баз данных, например, чертежей режущих инструментов, используются парамет¬ рические 3-D модели созданные в T-flex. Это связано с тем, что в данной системе, возможно, осуществлять расчеты, создавать внутренние базы данных и что самое важное проектировать
сложные параметрические модели и на основе их создавать изображения видов, разрезов и др. Пример такой модели приведен на рисунке 1. Если чертеж создан на основе параметрической 3-D модели, то при изменении исходных данных модели происходит автоматическое преобразо¬ вание изображений на чертеже.
Вестник СибАДИ, выпуск 1 (19), 2011 |
59 |
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
крепежная часть резца (державка)
передняя
поверхность
вспомогательная режущая кромка
вспомогательная задняя поверхность
Рис. 1. Параметрическое изображение 3-D модели режущего инструмента, выполненное в T-flex
Однако при создании указанных чертежей с использованием программы T-flex возникает проблема, связанная с тем, что после преобра зования на чертеже произойдет наложение фрагментов изображений друг на друга. Как пра вило, при этом пользователь редактирует дан ный чертеж вручную. В связи с этим предлагает ся использовать систему AutoCAD, которая по¬ зволит редактировать полученный чертеж в про¬ грамме T-flex автоматизированным способом. Для редактирования чертежа разработано про¬ граммное обеспечение, созданное на языке про¬ граммирования AutoLISP [1]. Оно позволяет про¬ водить автоматизированный анализ взаимного положения фрагментов изображений режущего инструмента с помощью определения границ зон видов и сечений на основе функций доступа к примитивам. Для того чтобы осуществить авто¬ матическую коррекцию положения фрагментов изображений необходимо выделить объект из чертежа. Например, выделить область, в кото¬ рую входят изображения сечения и его размеры (или виды и его размеры и т.д.), а также опреде¬ лить принадлежность графических примитивов данной области. Для этого разработаны специ¬ альные функции-подпрограммы, позволяющих получать информацию о графических объектах, и их взаимном положении [2]. При этом исполь¬ зуется теория множеств.
При оценке чертежа и определении его зон, необходимо, использовать прямоугольную об¬ ласть. Для задания прямоугольной области вос¬ пользуемся R-функцией, а именно R- конъюнкцией. Данная функция определяется следующей формулой [3]:
Y^ — X i л X 2 = X i + X 2 -4х I 2 + X |
(1) |
Прямоугольная область определяется нера¬ венствами ш1 > 0 и ш2 > 0 соответственно. Так как рассматриваемая область Q1 является прямо¬ угольной, выведем для нее неравенство. Пусть
область |
Q1 |
есть |
вертикальная |
поло |
са щ ° d2 |
- x2 > 0 , а Q2 |
- горизонтальная полоса |
||
со2 ° b |
> 0 (рисунок 2а.). |
|
||
Ч
л-
Рис. 2. Геометрические параметры, задающие фрагменты изображений
а) прямоугольная область; б) объединения областей.
Тогда воспользовавшись R-конъюнкцией (1) находим неравенство, которое определяет пря¬ моугольную область A1A2A3A4 [3].
(d2 - X j 2 ) л ( b ь -y2) > 0 . |
(2) |
Уравнение прямоугольника получаем в виде:
(d2 - Xj2) л (b1 - y2 ) — 0 . |
|
(3) |
|||
|
|
|
|
|
или |
°d2 + b1 -xJ-y2 -J(d2 -x2 )2 +(b |
y |
j 2 ) |
2 = |
= |
0 . (4) |
|
|
- |
|||
Далее выведем уравнение область Qi (рису¬ нок 2б.), которая представляет собой объедине¬ ние областей Q1 и Q2, Q1 = Q1 и Q2. Для нахож¬ дения границ области Qi используем операцию R-дизъюнкции, в качестве которой можно ис¬ пользовать следующую зависимость:
60 |
Вестник СибАДИ, выпуск 1 (19), 2011 |
PDF created with pdfFactory Pro trial version www. pdffactory. com