Материал: 1753
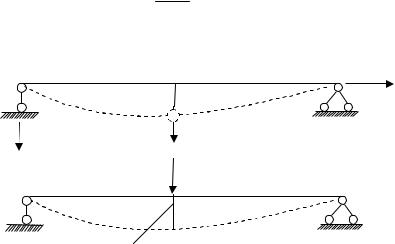
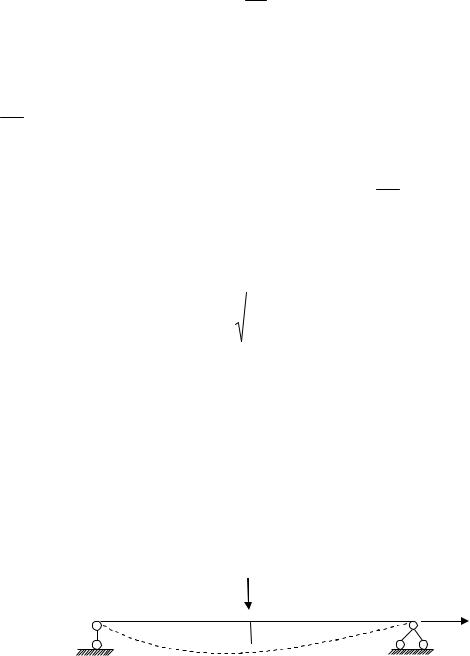
Рассмотрим невесомую балку, весом которой по сравнению с массой m пренебрегаем (рис. 9.4).
Рассмотрим положение массы m в момент времени t. Отклонение массы обозначим y(t). В отклонённом положении на массу m действует сила инерции J, равная, как известно из курса физики, произведению массы на ускорение.
d |
2 y |
. |
(9.1) |
J(t) m |
|
||
dt2 |
|
|
|
|
m |
|
|
|
●y(t) |
x |
|
|
|
|
|
y |
|
J |
|
F |
|
|
|
δ11
Рис. 9.4
Перемещение массы определяем через единичное перемещение в соответствии с выражением
у(t) J(t) 11. |
(9.2) |
Перемещение 11 в (9.2) представляет собой перемещение, найденное от действия силы F=1, приложенной в точке прикрепления массы m.
С учетом (9.1) выражение (9.2) принимает вид
у(t) m |
d 2 y |
11. |
(9.3) |
|||
|
|
|
||||
dt |
2 |
|||||
|
|
|
|
|||
Перенося все слагаемые в левую часть уравнения (9.3), получим дифференциальное однородное уравнение, описывающее собствен-
135
ные колебания системы с одной степенью свободы без учёта сил сопротивления внешней среды:
|
|
d 2 y |
|
|||
у(t) m |
11 |
|
|
0. |
(9.4) |
|
dt |
2 |
|||||
|
|
|
|
|||
Для приведения этого уравнения к стандартному виду разделим все слагаемые в (9.4) на произведение m 11.
|
|
|
d 2 y |
1 |
y 0. |
|
||||
|
|
|
|
|
|
|
|
(9.5) |
||
|
|
|
|
|
|
|||||
|
|
|
dt2 |
m 11 |
|
|||||
Обозначим в (9.5) 2 |
|
1 |
. Тогда дифференциальное уравнение |
|||||||
|
|
|||||||||
|
|
m 11 |
|
|
|
|||||
(9.5) принимает стандартный вид |
|
|
|
|||||||
|
|
|
|
d 2 y |
|
2 y 0. |
(9.6) |
|||
|
|
|
|
dt2 |
||||||
|
|
|
|
|
|
|
||||
Получили уравнение, описывающее собственные колебания системы с одной степенью свободы. Параметр собственная частота колебаний.
В математике получено решение уравнения (9.6), которое имеет следующий вид:
y A1 sin t A2 cos t, |
(9.7) |
где A1,A2 постоянные интегрирования.
Для определения A1,A2 используем начальные условия, имеющие
место в момент времени t=0. При t=0 начальный прогиб |
y у0, на- |
чальная скорость 0. Подставим в (9.7) t=0. |
|
у А1 sin0 A2 cos0 y0. |
(9.8) |
Из (9.8) находим, что А2 у0 . Для определения постоянного интегрирования А1 необходимо взять первую производную по времени от выражения (9.7), т.е. найти выражение, по которому в процессе колебания изменяется скорость перемещения колеблющейся массы.
136
|
dy |
A |
cos t A |
sin t. |
(9.9) |
||
|
|
||||||
|
dt |
1 |
2 |
|
|
||
|
|
|
|
|
|
||
Подставляя в (9.9) t=0, получим |
|
|
|||||
|
А1 cos0 A2 sin0 0. |
(9.10) |
|||||
Из (9.10) найдём, что А |
|
0 |
. С учётом найденных значений по- |
||||
|
|
||||||
1 |
|
|
|
||||
стоянных интегрирования решение дифференциального уравнения (9.7) принимает окончательный вид
у |
0 |
sin t y0 cos t. |
(9.11) |
|
|||
|
|
|
|
Получили закон перемещения массы. Предположим, что колеблющаяся масса m находится в покое и мы её вывели из равновесия,
придав ей начальную скорость 0. Тогда |
y |
0 |
sin t. Если в началь- |
|
|
||||
|
|
|
ный момент времени балка уже была изогнута (см. рис. 9.4) и она стала совершать колебания, то начальная скорость колебаний при этом0 0. Тогда уравнение колебаний примет вид y y0 cos t. Оба эти закона одинаковы по своему характеру, только смещены по фазе. Для
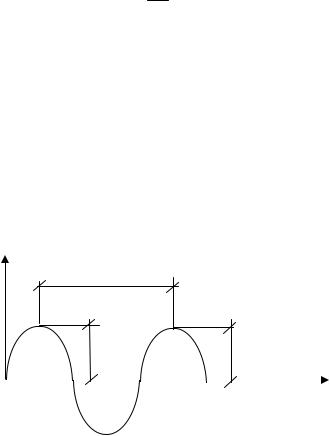
анализа колебаний примем закон y 0 sin t и построим его график
(рис. 9.5) согласно данным, приведённым в табл. 9.1.
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 9.1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
0 |
|
|
|
|
|
|
|
|
3 |
|
|
2 |
|
||
|
2 |
|
|
|
|
2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||||
t |
0 |
|
|
|
|
|
|
|
3 |
|
|
2 |
|
|||
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
y Т
А137 А
t
Из анализа графика (см. рис. 9.5) очевидно, что все циклы колебаний одинаковые. Наибольшее отклонение массы от положения статического равновесия равно постоянной величине, которая носит назва-
ние амплитуды колебаний А 0 . Удвоенная величина амплитуды
колебаний составляет размах колеблющейся точки. Время Т, за которое балка совершает полный цикл колебаний, называется периодом колебаний. Из анализа графика (см. рис. 9.5) можно записать, что
Т 2 . Число полных циклов колебаний в единицу времени называ-
ется частотой колебаний; если взять за единицу времени 2 с, то час-
тота собственных (свободных) колебаний 2 с-1. Учитывая, что
|
|
1 |
|
|
|
|
|
Т |
|
2 |
|
, частота собственных колебаний может быть определена |
|||||||
|
|||||||||
|
|
m 11 |
|
|
|
|
|||
из выражения |
|
|
|
|
|
||||
|
|
|
|
1 |
. |
(9.12) |
|||
|
|
|
|
||||||
|
|
|
|
|
m 11 |
|
|||
9.4.Вынужденные колебания системы
содной степенью свободы
Рассмотрим балку (рис. 9.6) с массой m. К массе приложена F(t) – возмущающая сила, создающая вынужденные колебания и изменяющаяся по гармоническому закону F(t) F0 cos t. Частота возмущающей силы обозначена символом , а амплитудное значение возмущающей силы – F0.
F(t)
m
●
y(t) |
x |
138

J(t)
y
 F(t)
F(t)
Рис. 9.6
Рассмотрим положение массы m в момент времени t. Отклонение массы обозначим y(t). В отклонённом положении на массу действуют силы: F(t) – возмущающая сила; J(t) – сила инерции. частота возмущающей силы; F0 амплитуда силы F(t).
Силами сопротивления, которые возникают при колебаниях, пренебрегаем. Перемещение массы в любой момент времени через единичное перемещение определяем по выражению
у(t) F(t) J(t) 11. |
(9.13) |
Подставим в (9.13) вместо инерционной силы J(t) выражение, представленное формулой (9.1)
y(t) |
|
F(t) m |
d |
2 |
y |
|
|
. |
(9.14) |
|
|
|
11 |
||||||
|
|
|
|||||||
|
|
dt2 |
|
|
|
||||
|
|
|
|
|
|
|
|||
После раскрытия скобок в уравнении (9.14) и деления всех слагаемых на произведение массы и единичного перемещения получаем
|
d 2 y(t) |
1 |
|
|
1 |
F(t). |
(9.15) |
||||||||
|
|
|
|
|
|
|
|
|
y(t) |
|
|||||
|
|
|
|
|
|
|
|
m |
|||||||
|
|
dt2 |
m 11 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||||
Обозначим в (9.15) = |
1 |
|
|
собственная частота колебаний. |
|||||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
m 11 |
|
|
||||||
Уравнение (9.15) принимает вид |
|
|
|
|
|
|
|||||||||
|
|
d 2 y |
2 y |
1 |
F cos t. |
(9.16) |
|||||||||
|
|
|
m |
||||||||||||
|
|
dt2 |
|
|
|
0 |
|
|
|
||||||
139