Материал: 1753
Проверка |
правильности |
определения |
значений |
RiF |
|||||
осуществляется в соответствии с выражением |
|
|
|||||||
|
|
|
|
Эп.MFо мет.сил |
n |
|
|
||
|
|
Эп.M |
|
|
|||||
|
|
|
|
|
RiF , |
|
(8.9) |
||
|
|
|
|
|
|||||
|
|
|
|
EJ |
|
|
i 1 |
|
|
где Эп.MFo эпюра изгибающих моментов (рис. 8.7) от внешней нагрузки, построенная в любой статически определяемой системе, являющейся основной системой метода сил рассчитываемой заданной системы.
8.4.Решение системы канонических уравнений и построение эпюр внутренних усилий
Найденные значения коэффициентов при неизвестных rij и сво-
бодных членовRiF подставляют в систему (8.4) канонических уравнений метода перемещений и решают любым известным в линейной алгебре способом.
В результате решения системы канонических уравнений метода перемещений находят значения Zi искомых перемещений. Нахождение искомых значений перемещений Zi означает, что заданная к расчёту (заданная система) стержневая конструкция становится кинематически определимой.
Все внутренние усилия, возникающие в поперечных сечениях стержней от найденных перемещений Zi и от заданной внешней нагрузки, могут быть в соответствии с принципом суперпозиции определены из выражения
n |
|
М Mi Zi МFo . |
(8.10) |
i 1
Необходимым контролем правильности построения эпюры М является условие равновесия изгибающих моментов в жёстких узлах рассчитываемой конструкции. В основной системе метода перемещений единичные Mi и грузовая MFo эпюры являются неуравновешен-
ными. Но единичные эпюры Mi , будучи каждая умноженная на соот-
130

ветствующее ей перемещение Zi и сложенные друг с другом и грузовой эпюрой MFo , обязательно должны в итоге давать эпюру моментов Мс уравновешенными в жёстких узлах моментами. Отмеченное условие правильности построения итоговой эпюры моментов М является необходимым, но недостаточным. Достаточным условием правильности построения эпюры М является проведение деформационной проверки, суть которой изложена в разделе 6 настоящего курса. При этом не имеет значения, с использованием какого метода – метода сил или метода перемещений – построена итоговая эпюра моментов М. Поэтому для проведения деформационной проверки из заданной рассчитываемой системы выбирают любую основную систему метода сил, в которой строят любую эпюру моментов Mi от действия неизвестной
силы |
|
1. Соблюдение условия |
Эп.М Эп. |
М |
i |
мет.сил |
свиде- |
|
Xi |
|
|
0 |
|||||
EJ |
|
|||||||
|
|
|
|
|
|
|||
тельствует о правильности построения эпюры М.
Построение эпюр поперечных Q и продольных N сил осуществляют точно так же, как это делается (см. раздел 6 настоящего курса) при решении статически неопределимых задач методом сил.
131
9. ОСНОВЫ ДИНАМИКИ СТЕРЖНЕВЫХ СИСТЕМ
9.1. Основные понятия
В предыдущих разделах был рассмотрен расчёт стержневых систем при действии на них статических нагрузок. Однако в практике создания и эксплуатации транспортных сооружений большинство нагрузок являются такими, которые во времени изменяют и свою величину, и направление действия.
Нагрузки, которые являются функциями от времени, называются динамическими. Динамические нагрузки при действии на элементы конструкции вызывают их колебания. Поэтому в колеблющихся элементах конструкции появляются инерционные силы, вызывающие возникновение в поперечных сечениях колеблющихся элементов сооружений дополнительные внутренние усилия.
Автопоезда, движущиеся по дорогам, мостам, передают нагрузки, изменяющиеся во времени. Транспортные конструкции в процессе действия на них динамических нагрузок испытывают колебательный процесс, вызывающий появление в конструкциях значительных инерционных сил. Особенно опасны колебания при резонансе, когда напряжения и деформации могут достигать бесконечности, т.е. наступает разрушение конструкции. Инженер должен уметь применять меры, направленные на уменьшение эффекта динамических воздействий.
В практике расчётов всё многообразие динамических нагрузок условно подразделяют на пять видов:
1. Вибрационная нагрузка, изменяющаяся во времени по какомулибо закону – синуса, косинуса и др.). Как правило, вибрационные нагрузки создаются вращением неуравновешенных масс. Например, вращение коленчатого вала автомобиля.
132
2.Ударная нагрузка, время действия которой составляет десятые доли секунды. Характерным примером создания ударной нагрузки является работа копра при забивке свай.
3.Импульсная нагрузка, время действия которой составляет сотые доли секунды. Характерным примером импульсной нагрузки является удар железнодорожного колеса при движении поезда о стык рельс.
4.Подвижная нагрузка, к которой относят автомобили, железнодорожные поезда, поезда метрополитена.
5.Сейсмическая нагрузка, характерная хаотичным изменением во времени и своей величины, и направления.
В настоящем курсе рассматривается действие только вибрационной нагрузки.
9.2.Определение числа степеней свободы
В динамике сооружений число степеней свободы равно числу независимых геометрических параметров, определяющих положение колеблющихся масс в любой момент времени. Из приведённого опре-
деления числа степеней свободы очевидно, что в динамике сооружений, в отличие от статики, появляется ещё одна координата – время.
Определение числа степеней свободы удобно проводить путём наложения связей. Минимальное число связей, устраняющих возможные перемещения масс, будет равно числу степеней свободы системы. При определении числа степеней свободы можно вводить допущения, упрощающие их нахождение.
Рассмотрим пример определения числа степеней свободы для простой балки, несущей массу m. Число степеней свободы такой балки равно 1 (рис. 9.1), так как масса m может колебаться только в вертикальном направлении.
● M
Рис. 9.1
Перемещением массы по горизонтали пренебрегаем. Пренебрегаем также вращением массы. Массу закрепляем одной вертикальной связью, устраняющей возможное вертикальное перемещение массы.
133
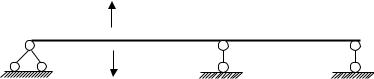
Если на балке расположено n колеблющихся масс (рис. 9.2), то число степеней свободы такой балки равно n.
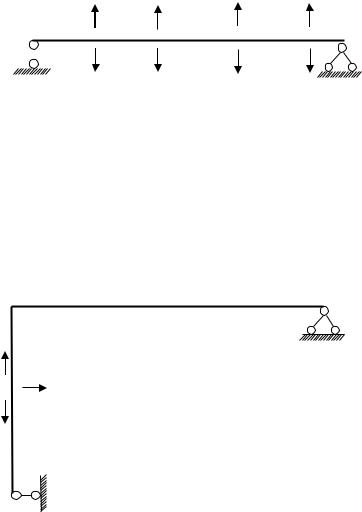
Рассмотрим раму, на стойке которой прикреплена колеблющаяся масса m (рис. 9.3). Учитывая, что изгибная жёсткость EJ ригеля есть конечная величина, масса m может колебаться как в горизонтальном, так и вертикальном направлениях. Число степеней свободы рассматриваемой системы равно 2.
|
|
m1 |
m2 mi |
|
mn |
|
|
|
● |
● |
● ● |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 9.2
Рассмотрим раму, на стойке которой прикреплена колеблющаяся масса m (рис. 9.3). Учитывая, что изгибная жёсткость EJ ригеля есть конечная величина, масса m может колебаться как в горизонтальном, так и вертикальном направлениях. Число степеней свободы рассматриваемой системы равно 2.
 ● m
● m
Рис. 9.3
Из приведенного примера очевидно, что число степеней свободы и число колеблющихся масс не всегда могут совпадать.
9.3.Собственные колебания систем с одной степенью свободы без учёта сил сопротивления внешней среды
134