Материал: 1671
3 го порядков малости относительно As. Следовательно, прямая АА\
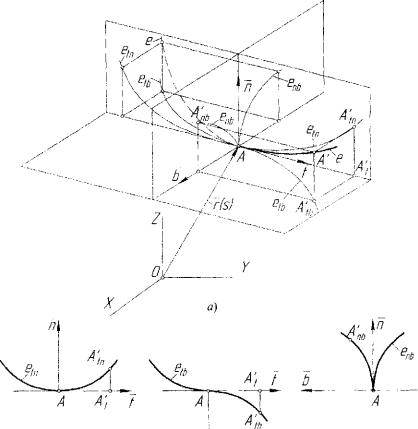
имеет с кривой eth касание 2-го порядка, т.е. точка А является точкой распрямления и кривая etb расположена по обе стороны касательной прямой АА\, так как коэффициент при Ъ меняет свой знак при смене знака у As (рис. 5.37, в).
ч2?
б) в) г)
Рис. 5.37. Ортогональные проекции кривой на гранях трехгранника Френе
170
Проекция кривой е на нормальную плоскость (п,Ь) представляет собой линию епЪ, уравнение которой получается из общего уравнения смещения А А исключением составляющей по касательной t :
~Mnh = п-11 k(Asf + ...J + b • | i ^ ( A 5 ) 3 +...] •
Анализ этого уравнения показывает, что точка А'пЬ описывает
кривую епЬ со смещением по векторам nub соответственно 2-го и
3-го порядков в малом относительно As-. Составляющая смещения по вектору п направлена в сторону этого вектора (&>0,(А<;)" > 0 ) , т.е. проекция enh находится с одной стороны бинормали Ь. Составляю щая смещения по вектору b меняет свой знак со сменой знака Ду при фиксированном знаке кручения % > т-с- о п а расположена по обе сто роны главной нормали п. Поскольку составляющая по Ъ есть беско нечно малая более высокого порядка малости относительно As\ чем составляющая по п, то проекция еп1> более плотно примыкает к век тору главной нормати /?, чем к вектору бинормати Ъ. Имеет место ючка возврата 1-го рода (рис. 5.37, г).
Различные виды пространственных кривых линий, обладающих определенными дифференциально-геометрическими свойствами, рассмотрены в работах [2, 26].
5.2.4.Кривизна ортогональных проекций кривой линии
|
Пусть кривая |
а, описываемая |
векторным уравнением |
r — r(s), |
||||
л0 |
< ,v < sn, |
где s |
- длина |
ее дуги, |
имеет |
на плоскостях |
Я, |
= XOY и |
П2 |
= XOZ |
ортогональные |
проекции |
а, и а2 соответственно |
||||
(рис. 5.38). |
Орты |
к и j декартовой |
системы координат |
XYZ |
с точно |
|||
стью до знака определяют направления ортогонального проецирова ния на плоскости проекций Я, и П-, соответственно. В таком случае уравнение проекции я, будет иметь вид:
171

r,=r-(r-k)k, |
(5.1) |
а проекции a2 вид: |
|
|
|
|
|
|
|
|
r2 =r-(r-J)j- |
(5.2) |
||
|
Уравнение (5.1) позволяет определить следующие производные |
|||||||||
радиус-вектора г, |
: |
|
|
|
|
|||||
|
|
|
|
|
|
л = ds |
-(Г к)к |
(5.3) |
||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
d~rx |
к-[п-(п-к)к], |
(5.4) |
|
|
|
|
|
|
|
|
"ds2" |
|||
|
|
|
|
|
|
|
|
|
||
где |
t |
, |
п - единичные векторы касательной и нормали исходной кри |
|||||||
вой |
а |
в некоторой ее точке А ; к кривизна кривой в этой точке. |
||||||||
|
I [уеть л 0 |
, < Л) < л н , |
- длина |
|
|
|||||
дуги проекции ы,. Из проекци |
|
|
||||||||
онной схемы на рисунке 5.38 |
|
|
||||||||
следует |
соответствие между из |
i а |
|
|||||||
менениями длины дуги 5 кривой |
|
|||||||||
|
|
|||||||||
а и |
длины дуги |
,v, |
ее |
ортого |
|
|
||||
нальной |
проекции |
а,, |
которым |
|
г, |
|||||
соответствуют |
взаимосвязанные |
а. |
||||||||
|
||||||||||
|
|
|
|
|
|
|
|
|
||
перемещения точки |
А по кривой |
|
|
|||||||
а и |
А{ |
по а{. Это |
соответствие |
|
|
|||||
может |
|
быть |
выражено |
прямой |
Рис. 5.38. Моделирование кривой в |
|||||
|
методе Монжа |
|||||||||
функциональной |
зависимостью |
|||||||||
|
|
|||||||||
si ~ A(s) и |
обратной |
s-F^s^. При этом функции |
fxw.F\— одно |
|||||||
значные, непрерывные и дифференцируемые. В таком случае могут быть определены следующие производные вектора г\ :
|
-, dr, |
- |
|
|
Л =—1 |
- ( п ' ) = ^ - |
|
|
ds. |
dsy 4 |
г,2 |
|
|
|
( > f ) 2 |
где / |
единичный вектор касательной кривой а. |
||
Кривизна кх кривой ах может быть выражена известной форму лой [26]: А, = jr, "[. Отсюда следует формула:
(h )
Последнее равенство равносильно следующему:
^ = ( Ц 5 Г _ |
( 5 . 6 ) |
(1 ) |
|
Для производных в формуле (5.5) можно записать их выражения |
|
F2 =\-(7-к)2 =(Гхк)\ |
(5.7) |
?{ =к2[\-(п-к)2} = к2(пхк)2, |
(5.8) |
и на их основе получить другие выражения, имеющие место в этой формуле:
•Л .~2 ;.2ц /~ 7Л2 /Г ;,Л2 , |
/ Г . 1 л 2 ,,"~.Тл2 |
/t2 [l-(n-irr-(/ - Jtr+a |
•ky-in-ky], |
/••г; - |/ - ( Л *)*]•[*:«-(*«•*)*] = -*(/ -А)-(и-Л);
(/^ -/^)2 = А2(г -А)2 -(п-к)2.
Подставим (5.3), (5.4), (5.7), (5.8) и следующие за ними выраже ния в формулу (5.5) и выполним необходимые преобразования. В ито ге получим выражение:
к2\\-(п-к)2-(7-к)2 +(Т-к)2 -(п-к)2]-к\Т-к)2 -(ri-lcf_ =
l = ~~~ |
~l^t~-Wf |
|
= k2[l-(n-k)2-(T'k)2]= k2(b-lcf_ |
|
|
~ [1 (' - А)2Г |
[1 -и - а г Г |
|
из которого следует формула: |
|
|
|
[b-k\ |
|
|
j f c , = * T L J - T . |
(5.9) |
Аналогично для проекции а2 можно получить формулу ее кри визны:
173
172

H- J |
|
= * - 1 . J - ^ = f T , |
(5.10) |
где b - единичный вектор бинормали кривой а. Из формулы (5.9) следует:
1. В случае плоской кривой а величина J6 • к\ есть постоянная и
представляет собой косинус угла наклона плоскости кривой к плоско сти проекций Я,, а в случае пространственной кривой а - косинус утла наклона соприкасающейся плоскости ( ( , « ) к //,;
2.Величина |/ хк\ есть косинус угла наклона касательной кри
вой линии а к плоскости проекций Пх.
Содержание п.п. 1 и 2 соответствуют известным в начертатель ной геометрии результатам исследования ортогональных проекций пространственной кривой, полученными из иных соображений [2].
Учитывая координатное представление каждого из единичных векторов / и b [26], уравнения (5.9) и (5.10) можно преобразовать к виду, удобному для практического вычисления кривизны ортогональ ных проекций а} и а2 исходной пространственной кривой а :
х У |
\ix |
|
х у |
|
|
;УЛ:. - |
, . |
(5.11) |
(х2+у2)2 |
(x2+z2Y |
|
Последние формулы с точностью до обозначений производных совпадают с известными формулами определения кривизны плоской кривой [261, заданной параметрическими уравнениями х = x(t), у - y(t), где параметр t - не длина дуги этой кривой. В (5.11) диффе ренцирование производится по параметру S (длина дуги пространст венной кривой а), который выполняет роль параметра t для проек ции этой кривой. Вычисление кривизны по формулам (5.11) возможно только в заведомо обыкновенных точках кривых ал т а2, поскольку для них имеет место соответственно t\ * 0; г2 * 0, а также в их точках
174
распрямления, необходимым и достаточным условием существования
которых является: |
х |
у |
= 0, |
z |
х |
= 0 |
|
|
|
|
х |
У |
|
|
Z |
X |
|
|
|
Из формул (5.9) и (5.10) следует, что кривизна ортогональных |
|||||||||
проекций ах и а2 в их соответственных |
точках А{ и |
А2 - ортогональ |
|||||||
ных проекциях точки |
А |
исходной пространственной кривой а, не за |
|||||||
висит от кручения х |
э т о и |
кривой. |
|
|
|||||
5.2.5. |
|
Определение кривизны кривой |
линии |
||||||
|
по |
ее |
ортогональным |
проекциям |
|
||||
Предположим, что а, и а2 - две плоские кривые, рассматривае мые как заданные ортогональные проекции некоторой кривой а про странства. Пусть эти кривые описываются векторными уравнениями: /[ = г,( . 9,), где s0i < 5 , < 5 n l ; r2 =r2(s2), где д02 < s2 <sn2. В таком слу чае из проекционной схемы на рисунке 5.38, а также существования однозначных, непрерывных и дифференцируемых функций .v, - Jx(s), s2 = f2(,s), следует:
г = 7г + {72 • l)k = г2 + (г, • j)j, |
(5.12) |
что позволяет определить единичный касательный вектор искомой
кривой а |
в пространстве |
|
|
|
|
|
|||
Г |
= , |
= |
*[.dsy + (dr2 |
d_s^ |
и |
Г ^ + |
1^к)1&2> |
( 5 ] 3 ) |
|
|
|
ds} |
ds ds2 |
ds |
ds |
|
ds |
|
|
а также |
получить |
выражение |
второй |
производной |
радиус-вектора |
||||
Ф ) : |
|
|
|
|
|
|
|
|
|
r=nk= n } k { ) 2 |
+ 1 \ ~ ^ + *[/, |
• k ) ^ |
- + (п2 |
• А)£2 |
• С^2 -)2 ]. (5.14) |
||||
|
|
fife |
|
t/.v~ |
|
|
|
«л- |
|
Уравнение |
(5.13) можно представить в виде t |
-r\ + (r2k)k, |
где |
||||||
точками, как и прежде, обозначено дифференцирование по параметру s. Очевидно, для определения вектора t в точке Аеа с параметром s, необходимо выполнение для этой точки хотя бы одного из усло-
175
„ j_ |
dn |
ds, |
л |
_ l |
dr7 |
ds2 . |
|
вии: r, |
= —- —- Ф 0; |
r2 |
= —^ —- |
j± 0, каждое их которых соответст- |
|||
|
dsx |
ds |
|
" |
ds2 |
ds |
|
вует достаточному признаку существования обыкновенных точек [26]
Ах е ах, Л2 |
е аг •> |
проекционно |
соответственных точке |
Ае\а с пара |
||||
метрами |
и s2 |
соответственно. Уравнение (5.3) позволяет записать |
||||||
выражение: |
|
|
|
|
|
|
|
|
|
|
|
г2 =1-{Г-к)2. |
|
(5.15) |
|||
Последнее уравнение на основании (5.13) можно преобразовать к |
||||||||
виду: |
|
|
|
|
|
|
|
|
|
|
|
P2=\-[(72-k)^f, |
|
(5.16) |
|||
|
|
|
|
|
|
ds |
|
|
Учитывая, что имеет место |
выражение |
г2 =(|^))2 |
=(-—1)2, урав- |
|||||
|
|
|
|
|
|
|
|
ds |
нение (5.16) можно записать следующим образом: |
|
|||||||
|
|
( ^ ) 2 = 1 - К ^ * ) ^ 1 2 . |
(5.17) |
|||||
|
|
ds |
|
|
|
ds |
|
|
Для кривых ах и а2, принятых в качестве ортогональных проек |
||||||||
ций некоторой кривой а |
пространства, имеют тождественные равен |
|||||||
ства: |
|
|
|
|
|
|
|
|
|
|
|
rx -i |
= r2 -i |
- г • i . |
|
(5.18) |
|
Дифференцируя эти равенства по параметру S, получим: |
||||||||
|
|
- |
.- ds, |
— |
т ds-, |
- - |
1Г. , Л, |
|
|
|
t r i - l |
=t2-,-±=t-i . |
|
(5.19) |
|||
|
|
|
ds |
|
|
ds |
|
|
откуда следует: |
|
|
|
|
|
|
|
|
|
|
|
ds, |
(-, • i |
ds-, |
|
|
|
|
|
|
ds |
tx • i |
ds |
|
|
|
Из сравнения уравнений (5.17) и (5.20) следует выражение произ |
||||||||
водной: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
ds2 |
|
|
|
{tx-if |
|
(5.21) |
|
|
ds |
(t2-ky-{triY+(t2-iY |
|
||||
|
|
|
|
|||||
|
|
|
|
|
176 |
|
|
|
Последнее уравнение позволяет преобразовать выражение (5.20) к виду:
|
|
|
|
|
|
(h-T)2 |
|
ъ |
(5.22) |
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
(t2 -к)2 |
•(/, -Г)2 |
+(/2 - О 2 |
|
||
|
Повторное дифференцирование (5.22) приводит к выражению |
||||||||
второй производной: |
|
|
|
|
|
|
|||
|
|
=~^2-\к2ё-~^^Ык2па2 |
+ |
к}евГ) |
+ |
к2буЦ, |
(5.23) |
||
|
ds2 |
|
czal+yl\" |
|
sza'+y |
|
|
|
|
в |
котором |
приняты |
следующие |
обозначения: |
tv-i =а; |
nx-i = В; |
|||
t2-i |
-у\ n2-i |
-5\ t2-k~ |
= |
K; п2-к |
= п. Повторное дифференцирова |
||||
ние выражения (5.21) также приводит к выражению второй производ ной:
^ |
~> |
|
1 |
Лк.уВ- |
, |
а~ |
• Ay(kte7В+ к2В) + к2а2£т?)\. |
(5.24) |
||
i |
2 |
2 |
2 " р |
2 2 |
|
2 |
|
|
|
|
ds' |
£ |
а |
+ у |
s |
а |
+ у |
|
|
|
|
|
Приведенные формулы позволяют получить из уравнения (5.14) |
|||||||||
кривизну к |
искомой кривой а пространства |
|
|
|||||||
|
|
|
|
|
к = (А2 |
+ В2 + C 2 ) S |
|
(5.25) |
||
где |
приняты |
обозначения: |
. |
d2s> |
„ , ,ds,.2 |
п |
d2s2 |
|||
А - — г - ; |
л = /с,(—) ; |
с = £••—— + |
||||||||
|
|
|
|
|
|
|
ds |
ds |
|
ds~ |
+Пк2(^)2. ds
Уравнения 5.13, 5.14, 5.21, 5.22, 5.23 и 5.24 определяют положе ние трехгранника Френе кривой линии в сс текущей точке по ортого нальным проекциям этой кривой.
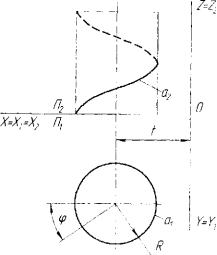
Рассмотрим пример. Выберем в качестве линий а, и а2 окруж
ность и косинусоиду соответственно (рис. 5.39). Уравнения линииat
имеют вид: |
|
хл = Я, cos<р + tx; ух = R{ sin <р +12; 0 < <р < 2ж. |
(5.26) |
Уравнение линии а2 имеет вид: |
|
177 |
|
|
|
|
|
|
х2 = R2 |
cos(—) + U. |
(5.27) |
Для |
выполнения |
проек |
|
|
|||
ционного |
соответствия рас |
|
|
||||
сматриваемых линий ах и а2 |
|
|
|||||
на чертеже Монжа необходимо |
|
|
|||||
ввести |
условия |
|
Rx = R7 = R; |
|
|
||
tx =t2=t; |
x, = x2, |
которые |
|
|
|||
приводят |
к |
|
уравнению |
|
|
||
7, |
|
|
|
|
|
|
|
cos(—) = cosij?. |
Из него следу- |
|
|
||||
ст ^ = ±<р + 2т. |
Для |
обеспе- |
|
|
|||
И |
|
|
|
|
|
|
|
чения |
проекционной взаимной |
|
|
||||
однозначности |
|
соответствия |
|
|
|||
линии |
я, |
и |
а |
принимаем |
|
|
|
z2~fjip, |
где |
/л |
- |
веществен |
Рис. 5.39. Цилиндрическая шгатоная |
||
ный коэффициент. Таким об |
линия |
|
|||||
|
|
||||||
разом, |
(р является общим параметром в уравнениях кривых |
о, и а,. |
|||||
Учитывая это обстоятельство и используя известные вычислительные формулы для единичных векторов касательных и нормалей плоских
кривых |
о, |
и а2 |
[26], можно получить выражения |
ранее |
введенных |
||||
параметров: |
|
<z = - s i n ^ ; |
/J = -cos<p; |
у |
= Rco'hmcp; |
||||
8--^2R2Rco |
'cos<p; |
|
|
s = /лоз |
tj = -R2R2jUco "Vos^sin^; |
||||
2 |
i |
9 |
1 |
R2=~; |
1 |
1 |
Подставляя |
выражения пара- |
|
w = (R |
sin'tp +/u~)2; |
|
i? = —. |
||||||
метров в (5.21), (5.22), (5.23) и (5.24), на основании (5.25) получим из вестную формулу [26] для вычисления кривизны цилиндрической винтовой линии: к = R(R2 + /и2ух.
Определение кручения кривой линии а по заданным ее проекци ям at и а2 представляет собой более сложную задачу, чем определе-
мне се кривизны к. Решение этой задачи может быть выполнено на основе дифференцирования выражения (5.13) по параметру S.
Отметим, что задача восстановления кривизны и кручения кри вой линии по ее модели - пары взаимосвязанных ортогональных про екций, в учебной и научной геометрической литературе не рассмат ривалась.
5.2.6.Проекционные свойства алгебраических кривых
Кроме общих проекционных свойств, характерных для неалгеб раических и алгебраических пространственных кривых, вытекающих из соответствия геометрий в малом пространственной кривой и ее проекций, алгебраические кривые дополнительно обладают проекци онными свойствами, которые отражают соответствие алгебраических характеристик этих кривых и их проекций [15, 16]. Приведем основ ные из них.
1.Для центрального проецирования в общем случае порядок ал гебраической кривой равен порядку ее проекции.
Как известно, порядок п пространственной алгебраической кри вой равен числу точек ее пересечения с произвольной плоскостью пространства. Проведем плоскость через центр проецирования. Эта плоскость пересечет кривую в П точках. В силу однозначности цен трального проецирования и-точек пересечения отобразятся в п точек пересечения прямой линии - следа проведенной проецирующей плос кости, и проекции пространственной алгебраической кривой линии на плоскости проекций.
2.Если центр проецирования является / -кратной точкой алгеб раической кривой порядка п, то порядок криволинейной составляю щей проекции кривой равен n — i. Действительно. Через / -кратную точку проходят г ветвей алгебраической кривой. Возьмем на каждой ветви по две точки, бесконечно близко расположенные к i -кратной точке. Эта тройка точек на каждой ветви определяет плоскость, пре дельным положением которой является соприкасающаяся в / - кратной точке плоскость этой ветви. Таким образом, в / -кратной
178 |
179 |