Материал: 1503
|
|
|
|
|
2,053 |
|
|
|
|
|
|
0,83 |
1,371 |
0,90 |
1,643 |
0,97 |
2,169 |
|
|
|
|
|
|
0,84 |
1,404 |
0,91 |
1,694 |
0,98 |
2,325 |
|
|
|
|
|
|
0,85 |
1,439 |
0,92 |
1,750 |
0,99 |
2,576 |
|
|
|
|
|
|
0,86 |
1,475 |
0,93 |
1,810 |
0,999 |
3,290 |
|
|
|
|
|
|
На следующем этапе проводится сопоставление границ доверительных интервалов. Если, как это показано на рис. 1.11, нижняя граница какого-либо интервала оказывается выше верхней границы одного из остальных интервалов, принимается гипотеза о нестационарности исследуемого процесса на интервале T.
Рис.1.11. Диаграмма 95%-ных доверительных интервалов для дисперсии температуры воздуха (С-Петербург, 1 мая)
Обращаясь к рис. 1.11, можно сделать заключение, что в интервале 0-8 часов процесс является стационарным по дисперсии. Если такие заключения будут сделаны и по математическому ожиданию и корреляционной функции, СП признается стационарным на исследуемом отрезке времени.
Изложенный подход позволяет перейти от нестационарных процессов к кусочно-стационарным (состоящим из последовательных отрезков стационарных СП). Членение (исследование на нестационарность) СП осуществляют с помощью технологии отыскания «разладки процессов».
Пусть дана одномерная последовательность независимых
случайных |
величин x1, x2, ,xt0 |
, ,xt0 N . |
До |
момента |
t0 1 |
они |
|
имеют распределение вероятностей |
1(xt t0 ), |
а с момента |
t0– |
||||
2 (xt t0 ). |
Для нахождения |
точки |
t0 |
предложен |
алгоритм |
||
кумулятивных сумм (АКС) – последовательный критерий отношения
вероятностей для двух гипотез |
H1 (нет разладки): 1 |
и H2 (есть |
|
разладка): 2 , где |
– |
скалярный параметр |
плотности |
распределения вероятностей xi |
/ . В качестве могут выступать |
||||||||
любые моменты распределения, и |
если последовательность xt |
||||||||
гауссова, то функция разладки принимает простой вид: |
|
|
|||||||
|
|
|
|
k |
|
2 |
|
|
|
gt St min Sk , |
Sk |
|
|
2 1 |
xi k |
|
1 |
. |
|
|
2 |
|
|
2 |
|||||
k t |
|
|
|
|
i 1 |
|
|
|
|
Кумулятивная сумма St(Sk ) в среднем дрейфует вниз (рис. 1.12), а после разладки вверх (изменяется знак суммы математических ожиданий ( 2 1). На каждом шаге (поступлении очередного отсчета) формируется функция gt , и если она превышает порог h, подается сигнал разладки.
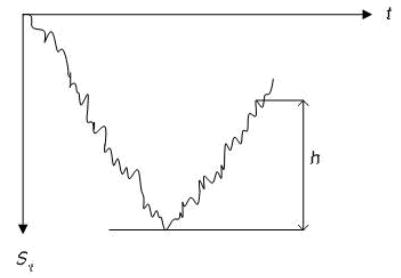
Рис. 1.12. Типичное поведение кумулятивной суммы St
На практике чаще встречается упрощенный вариант алгоритма рассмотренного вида. Из последовательности xt берется выборка
x t N 1 чисел. По выборке вычисляется кумулятивная сумма
St St 1 ln xt / 2 / xt / 1 ,
которая сравнивается с порогом h. При S h выдается сигнал о разладке, при St h процесс наблюдения продолжается и обрабатывается выборка с вновь поступившим отсчетом. Если случайная последовательность гауссова, кумулятивная сумма вычисляется по формуле
|
|
2 |
|
t N 1 |
|
2 |
|
|
|
|||
Sk N |
|
|
|
1 |
|
xi N |
|
1 |
|
, |
||
|
|
2 |
|
|
|
2 |
||||||
|
|
|
|
|
i t |
|
|
|
|
|||
где N – длина выборки.
В соответствии с постановкой задачи процедура последовательных обнаружений разладки характеризуется средним

запаздыванием обнаружения момента разладки и средним временем до очередной ложной тревоги T . Если после ложной тревоги режим слежения продолжается, T будет означать среднее время между ложными решениями.
Для рассмотренного упрощенного алгоритма обнаружения разладки получены оценки:
|
|
|
|
|
N |
|
|
|
N |
|
|
1 |
|
|
|
x2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
τ |
|
|
|
, Τ |
|
, Φ(x) |
|
|
e 2 dx, |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
N) Φ(k k N) |
|
2 |
|||||||||||||||
|
|
Φ(k k |
|
|
|
2Φ(k) |
|
x |
|
|
|
||||||||
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где k – расчетное значение порога; k1– фактическое значение отклонения среднего в долях среднеквадратичного отклонения .
Изменения характеристик нарушают стационарность исследуемого процесса, и используемые для выявления этого нарушения методы служат основой для принятия решения «стационарный – нестационарный процесс». Обобщенная классификация существующих методов обнаружения разладки приведена на рис. 1.13, классификация последовательных параметрических методов – на рис. 1.14.
Из 16 видов последовательных параметрических методов, приведенных на рис. 1.14, сравнительно хорошо исследованы 1 и 9 из них, а 8, 5, 7, 13, 15 мало изучены. При необходимости более подробного ознакомления с алгоритмами обнаружения разладок в случайных последовательностях можно обратиться к монографической литературе [1].
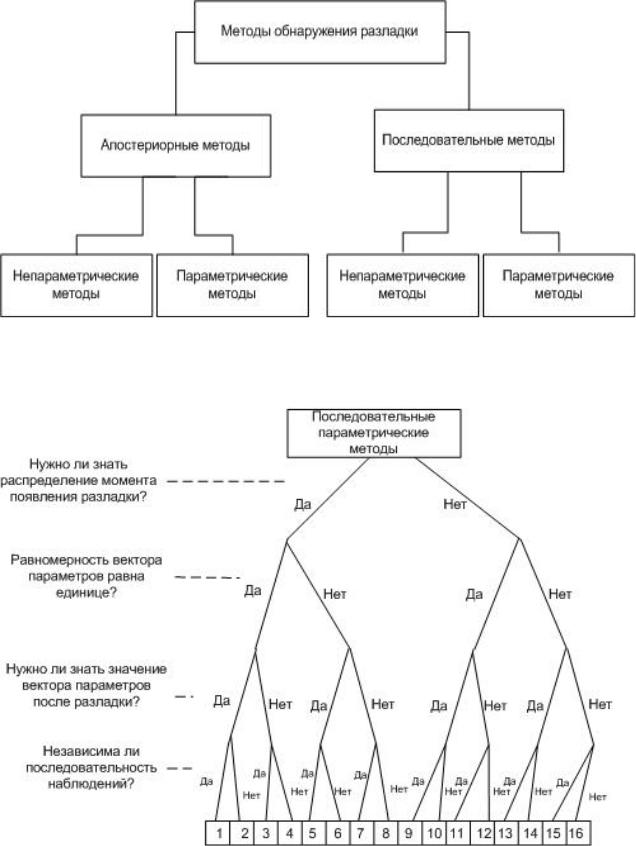
Рис. 1.13. Общая классификация методов обнаружения разладки
Рис. 1.14. Классификация последовательных параметрических методов