Материал: 1503
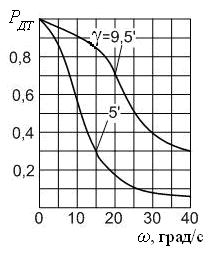
где С 4(угл.мин)-3 (кд/м2)-0,3 град2 с-2; 2 /t – угловая скорость движения объектов.
Кривые на рис. 2.2 позволяют судить о степени снижения вероятности обнаружения объекта при его перемещении в поле наблюдения.
Рис. 2.2. Расчетные вероятности обнаружения движущихся объектов при яркости фона 100 кд/м2
в поле обзора 45° при контрасте 0,2
На сегодняшний день не выдвинуто заслуживающих внимания аргументов против использования приведенных формул для анализа изображений на экранах электронно-лучевых индикаторов, а также сформированных оптическими приборами. В последнем случае все необходимые величины следует пересчитать для пространства изображений:
|
|
|
Κ |
|
= Κ / 1+qp ; |
|
|
|
|
|
γ =Г ; |
|
Βф= 0 |
Bф; 2β =Г2β , |
|
||||
где |
Г – увеличение |
|
оптики; |
qp – коэффициент светорассеяния |
|||||
(qp |
= 0,05 – 0,1), 0 – коэффициент светопропускания оптики. |
|
|||||||
|
При использовании формул (2.4), (2.5) следует помнить о |
||||||||
границах |
их применимости: |
|
K 0,02; |
Bф 500кд/м2; |
1; |
||||
t 1c; |
0,1 PT |
1. |
|
Фон, на котором наблюдается объект, |
должен |
||||
быть однородным, а флуктуации яркости изображения сопоставимы или ниже порога восприятия. В типичных задачах последнее условие
обычно не выполняется. Имеющиеся результаты исследований по обнаружению и опознаванию зрительной системой сигналов в условиях маскирующих помех более скромны. Интерес представляют те из них, которые позволяют сопоставить надежность обнаружения (опознавания) одних и тех же сигналов в шумах человеком и автоматом.
В табл. 2.1 приведены результаты эксперимента, которые характеризуют зависимость вероятности правильного опознавания PОП от вероятности ошибочных решений PОШ для группы операторов и алгоритма, реализующего правило минимума среднего риска.
Таблица
2.1
Вероятности правильного опознавания ошибочных решений оператора и алгоритма в однотипных экспериментах
|
PОШ |
0,175 |
0,205 |
0,225 |
0,260 |
|
PОП |
Положение фигуры |
операторы |
0,97 |
0,93 |
0,80 |
0,52 |
|
|
|
|
|
|
|
|
известно |
алгоритм |
0,96 |
0,93 |
0,85 |
0,57 |
|
|
|||||
|
|
|
|
|
|
|
|
Положение фигуры |
операторы |
0,92 |
0,70 |
0,55 |
0,41 |
|
|
|
|
|
|
|
|
неизвестно |
алгоритм |
0,93 |
0,76 |
0,57 |
0,50 |
|
|
|||||
|
|
|
|
|
|
|
Предъявляемый материал представлял собой семь двухградационных изображений абстрактных фигур, каждое из которых подвергалось воздействию помех путем замены значений яркости случайно выбранных элементов на обратную. Операторы знали априорные вероятности предъявления каждого из изображений фигур и их точное описание. Алгоритм опознавания автоматом сводится к составлению отношений правдоподобия (по числу опознаваемых классов) и сравнению их между собой с учётом равенства цен ошибок. Обращает на себя внимание близость

полученных операторами и автоматом результатов (см. табл. 2.1), что подтверждает гипотезу о функционировании зрительной системы по алгоритму, минимизирующему средний риск решений.
Другой любопытный результат был получен при обработке данных по опознаванию изображений известных операторам предметов в условиях их маскировки аддитивным гауссовым шумом:
PОП 0,5 1 Ф(А ОСП С) ,
где А и С – коэффициенты; Ф(…) – интеграл Лапласа.
При отношении сигнал/шум ОСП ≥ 2 указанная зависимость хорошо аппроксимируется выражением
1
РОП 1 Ф(0,236 ОСП 0,95 . 2
Это обстоятельство служит ещё одним доводом в пользу формирующейся точки зрения о функционировании зрительной системы при обнаружении и опознавании образов по правилам статистической теории принятия решений.
Из приведённых материалов следует, что вероятность правильного обнаружения объектов оператором на предъявляемых изображениях должна подчиняться зависимости вида
PПО |
|
|
Рс В dВ |
(2.6) |
ВП
и определяться уровнем сигнала ВC, дисперсией помех (или обобщенным показателем ОСП=(ВС – ВФ)/σ), а также выбранным порогом принятия решений ВП . Механизм выбора порога ВП зрительной системой при изменении характеристик предъявляемых изображений не ясен.
Для установления вида кривой (2.6) можно использовать следующий приём. Создаются условия, обеспечивающие уровень PT в (2.4), близкий к единице. Последовательное наложение на
наблюдаемую картину помех с изменяющейся интенсивностью позволяет установить вид зависимости РПО = f(ОСПВ):
РПО 1 exp[ 0,15(ОСПВ 1)2]. |
(2.7) |
Выражение (2.7) есть результат аппроксимации экспериментальных данных, полученных при обнаружении простых объектов на однородном фоне в присутствии аддитивных гауссовых помех для случаев ОСП 1, и должно зависеть также от угловых размеров поля поиска, его яркости, времени наблюдения. Если принять, что перечисленная группа событий не зависит от наблюдаемого ОСП , верхняя оценка вероятности обнаружения
РОб РТ РПО .
При использовании приведенных формул применительно к телевизионному изображению необходимо позаботиться о выполнении одного условия. По данным [3] число строк на высоту кадра должно превышать 232, а на объект обнаружения приходится не менее 4-х.
Еще сложнее учесть все факторы, влияющие на вероятность опознавания – вероятность отнесения обнаруженного объекта к узкому классу объектов. Оператор не испытывает затруднений при решении этой задачи.
Имеющаяся информация по данному вопросу не носит законченного характера. Тем не менее, ряд сведений по опознаванию образов, которые уже используются в практике, полезно привести.
В вопросе о необходимой детальности описания объектов классификации существует единая точка зрения: вероятность правильного опознавания увеличивается с улучшением разрешающей способности приборов. Для уверенного опознавания (вероятность 0,9) число строк тепловизионного изображения на объект должно быть порядка 8. В [4] приводится формула, описывающая результаты экспериментов по опознаванию типографских знаков на телевизионном экране:
|
|
Ρ/ 1 exp 6,4 10-3 |
c |
n |
2, |
|
|||
|
|
op |
|
|
|
c |
|
||
где c – |
угловой |
размер |
знаков, мрад; nc – число строк, |
||||||
укладывающихся в изображение знака. |
|
|
|
|
|||||
Другое выражение: |
|
|
|
|
|
|
|
||
|
|
Ρ/ exp[-(k |
|
n 1)2 |
] , |
(2.8) |
|||
|
|
on |
|
c |
|
|
|
|
|
где k – |
коэффициент формы объекта. По данным [7] k |
1,42 для |
|||||||
круга, k = 1,55 для квадрата, k = 1,74 – для треугольника. |
|
||||||||
Формулу (2.8) |
можно |
рекомендовать |
для ориентировочной |
||||||
оценки вероятности опознавания объектов при отсутствии заметных помех на предъявляемых изображениях.
Надежные данные, характеризующие зависимость вероятности опознавания от интенсивности маскирующих помех, отсутствуют.
При |
опознавании |
различных |
подклассов |
объектов |
кривые |
|
Ρon/ |
f ОСП |
не |
идентичны. |
Для простых |
объектов |
кривая |
Ρon/ |
f ОСП |
при ОСП > 5 входит в насыщение. В экспериментах по |
||||
опознаванию объектов бронетанковой техники увеличение Pop наблюдалось вплоть до ОСП = 15 [5].
Приведенные сведения по характеристикам зрительной системы необходимо учитывать при проектировании систем, в которых функции принятия решений и управления осуществляет человек.
Задачи
1. Требуется определить время обнаружения объекта прямоугольной формы размерами 1,2х2,4 мм, наблюдаемом на экране круглой форме (диаметр экрана 650 мм) с расстояния 1 м. Яркость экрана составляет 30 кд/м2. Контраст объекта с фоном K = – 0,15. Поиск ведется бинокулярно, невооруженным глазом. Вероятность обнаружения P 0,8, шумы не заметны для глаза.
Расчет проводится по формуле (2.4), преобразованной к виду
|
lg1 P |
-1 |
2 2 |
|
t |
Τ |
|
|
. |
C K2 |
|
|
||
|
3B0,3 lge |
|||
|
б |
ф |
|
|