Материал: 1337
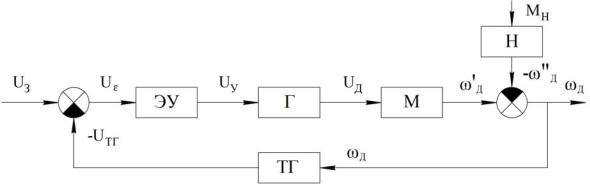
При увеличении нагрузки MC уменьшается скорость вращения вала двигателя ωД и соответственно снижается напряжение
тахогенератора UТГ. Суммарное напряжение Uε увеличивается, следовательно, увеличивается напряжение обмотки возбуждения генератора (ОВГ), напряжение на двигателе и угловая скорость. При уменьшении нагрузки MC увеличивается напряжение тахогенератора
UТГ. уммарное напряжение Uε уменьшается, при этом уменьшается напряжен е ОВГ угловая скорость ДПТ снижается.
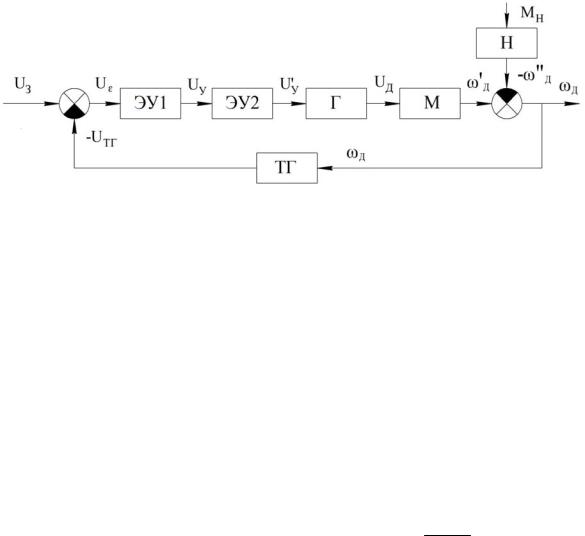
Пр нц п работы системы стабилизации, представленной на
двигателя
рис. 2 аналог чен.
Угловая скорость ωД изменяется с изменением нагрузки на валу |
|
С |
|
МС. В результате можно записать, что помеха равна: |
|
f(t) = kf MC(t), |
(1) |
где kf – передаточныйбкоэффициент по каналу помехи.
Стаб л зац я угловой скорости ωД достигается за счет подачи
напряжен я UД на якорную о мотку двигателя. САР является статической, поэтому ра отает со статической ошибкой, которая не должна превысить заданнойАвеличины.
3. СТРУКТУРНАЯ СХЕМА СИСТЕМЫ СТАБИЛИЗАЦИИ И ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ЕЕ ЭЛЕМЕНТОВ
Принципиальные схемы системДстабилизации (рис. 1,2) преобразуются в блок–схемы (рис. 3,4), по которым выводятся дифференциальные уравнения отдельных элементов.
И
Рис. 3. Блок–схема системы стабилизации угловой скорости ДПТ для нечетных вариантов
6
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
Р с. 4. Блок–схема системы стабилизации угловой скорости ДПТ |
|
|||||||||||||||||||||||||||||||||||||||
Дифференц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
для четных вариантов |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
альные уравнения элементов системы: |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
1. |
|
|
бdt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
ЭУ – электронный усилитель: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
2. |
Г – генератор: |
|
|
|
|
|
|
UУ U |
kЭУ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) |
||||||||||||||||||
|
|
|
|
|
|
|
dU Д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
T |
U |
Д |
|
k |
U |
У |
. |
|
|
|
|
|
|
|
|
|
(3) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
3. M – двигатель постоянного тока: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
d 2 Д |
|
|
|
d Д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dМ |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
||||||||||||||||||||||||
T |
Я |
T |
|
|
|
T |
|
|
|
|
|
|
Д |
k |
Д |
U |
У |
k |
f |
(T |
Я |
|
|
|
|
|
Н М |
Н |
). (4) |
|||||||||||||||
|
|
М |
|
dt 2 |
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
Аdt |
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
4. |
ТГ – тахогенератор: |
|
|
UТГ |
|
|
|
|
kТГ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
(5) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
И |
|||||||||||||
|
|
По уравнениям звеньев САР вывести передаточные функции. |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
4. ПРОВЕРКА СТАТИЧЕСКОЙ ОШ БКИ |
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
Передаточная функция разомкнутой системы: |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
WРАЗ( p) WЭУ ( p) WГ ( p) WД ( p) WТГ ( p) ; |
|
|
(6) |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
W |
( p) k |
|
|
|
|
|
k1 |
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
|
k ; |
|
|
(7) |
|||||||
|
|
|
|
|
|
|
|
T p 1 |
|
|
|
T |
|
p2 T |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
РАЗ |
|
|
|
|
ЭУ |
|
T |
Я |
|
|
p 1 |
ТГ |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
W РАЗ ( p ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k РС |
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
(8) |
||||||||
|
|
|
|
|
(T p 1) (T |
Я |
T |
М |
p 2 |
T |
М |
p 1) |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где |
kРC kЭУ k1 |
k Д kТГ |
|
– |
|
|
коэффициент |
|
передачи разомкнутой |
|||||||||||||||||||||||||||||||||||
системы.
7
Статическая ошибка |
|
|
|
f (t) |
|
k f |
MC (t) |
|
|
|
|
|
|
|
|
. |
(9) |
||||
1 |
kРС |
1 |
kРС |
|||||||
СТ |
|
|
|
|
||||||
Полученную статическую ошибку необходимо сравнить с |
||||||||||
разрешенной (см. прил. 1) и принять решение о необходимости ввода |
||||||||||
в систему корректирующего звена. |
|
|
|
|
|
|||||
5. КОРРЕКТИРУЮЩЕЕ ЗВЕНО |
|
|||||||||
С |
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
||||
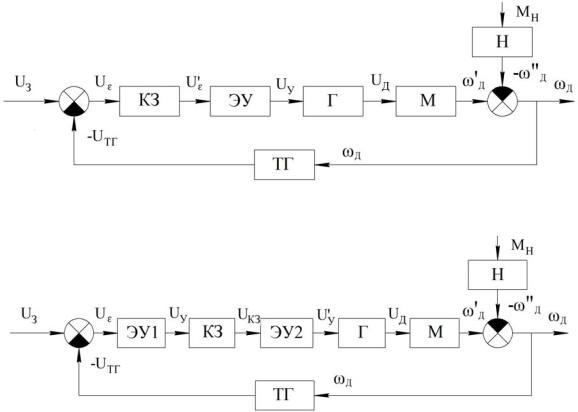
Рис. 5. Блок–схема системы ста илизации угловой скорости ДПТ |
|
|||||||||
с корректирующим звеном для нечетных вариантов |
|
|||||||||
б |
|
|
|
|||||||
А |
|
|||||||||
Рис. 6. Блок–схема системы стабилизации угловой скорости |
|
|||||||||
|
|
|
|
ДПТ |
|
|||||
с корректирующим звеном для четных вариантов |
|
|||||||||
Корректирующее звено подбирается из прил. 2 и подключается в |
||||||||||
основную схему в указанных точках (рис. 7,8). |
|
|
||||||||
|
|
|
|
|
|
|
И |
|||
8
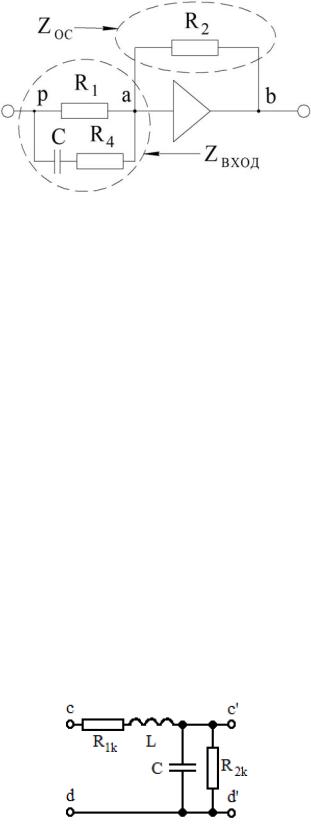
Пример расчета активного корректирующего звена (рис. 7):
С |
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|||||||
функция |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
Р с. 7. Активное корректирующее звено |
|
||||||||||||||||||||||
Передаточная |
|
|
|
активного корректирующего звена: |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
WКЗ ( p) |
|
|
|
|
ОС |
|
|
; |
|
|
|
(10) |
|||||||
|
|
|
|
|
|
|
|
|
|
Z |
ВХОД |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
А |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Z |
ОС |
|
R2 |
; |
|
|
|
|
|
|
(11) |
||||||
|
|
|
б1 1 |
|
1 |
|
|
; |
|
(12) |
||||||||||||||||||
|
|
|
|
|
|
|
|
Z ВХОД |
|
R1 |
|
|
|
R4 |
1 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cp |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
(R4 1) |
|
C p 1 |
; |
(13) |
|||||||||||||
|
|
|
|
|
|
|
|
Z ВХОД |
R1 (R4 C |
p 1) |
|
|
||||||||||||||||
|
|
|
|
|
|
ZОС |
|
|
R2 |
|
(R4 1) C p 1; |
(14) |
||||||||||||||||
|
|
|
|
|
|
Z |
|
|
|
|
R |
|
|
|
R C |
p 1 |
|
|
||||||||||
|
|
|
|
|
|
|
ВХОД |
|
1 |
|
|
|
|
4 |
|
|
|
|
|
|
И |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T02 p 1 |
|
|
||||||||||
|
|
|
|
|
|
|
|
WКЗ ( p) k0 |
|
|
|
|
|
, |
|
(15) |
||||||||||||
|
|
|
|
|
|
|
|
T |
|
|
|
p 1 |
|
|||||||||||||||
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
01 |
|
|
|
|
|
|
|
|
||||
где k |
0 |
|
; T |
R C ; T |
|
(R |
4 |
1) C . |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
01 |
4 |
|
02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример расчета пассивного корректирующего звена (рис. 8):
Рис. 8. Пассивное корректирующее звено
9
Передаточная функция пассивного корректирующего звена:
|
|
|
|
|
|
|
|
|
|
|
|
WКЗ |
( p) |
|
|
ZОС |
|
|
; |
|
|
|
|
|
|
|
|
|
|
(16) |
|||||||||||||||
С |
|
|
|
|
Z ВХОД |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
Cp ; |
|
|
|
|
|
|
|
|
|
|
|
(17) |
||||||||||||||||||
|
|
|
|
|
Z |
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
ОС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2k |
|
|
|
R2k |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
ZВХОД R1k Lp |
|
|
|
|
|
; |
|
|
|
|
|
|
|
(18) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
R2k Cp |
1 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2k C p 1 |
|
|
|
|
|
; |
|
|
(19) |
||||||||||||||||
|
|
|
Z |
|
|
L R |
C p2 |
|
(R |
|
R |
|
|
C L) p R |
R |
|
|
||||||||||||||||||||||||||||
и |
|
|
|
|
|
|
1k |
|
|
|
2k |
|
|
|
|
|
|
|
1k |
2k |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
ВХОД |
|
|
|
2k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
ZОС |
|
|
|
|
|
|
R2k |
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
(20) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2k C |
p 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
ZОС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2k |
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
(21) |
||||||
|
|
|
|
L R |
C p2 |
|
(R |
|
R |
C L) p R |
R |
|
|
||||||||||||||||||||||||||||||||
|
|
|
Z |
ВХОД |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
2k |
|
|
|
|
|
|
|
|
|
|
|
|
1k |
|
|
|
2k |
|
|
|
|
|
|
|
1k |
2k |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
WКЗ |
( p) |
|
|
|
|
|
|
|
|
|
k0 |
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
(22) |
|||||||||
|
|
|
|
|
|
|
|
|
|
T 2 |
|
p2 T |
|
p 1 |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
01 |
|
|
|
|
|
|
|
|
|
02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2k |
|
|
|
2 |
L R2k |
|
C |
|
|
|
|
|
|
|
|
|
R1k R2k C L |
|
|
|
|
|
|
|
|
|||||||||||||||
где k |
0 |
|
|
|
б; T ; T |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
R1k R2k |
|
|
|
R1k R2k |
|
|
|
|
|
|
|
|
|
|
|
|
R1k |
R2k |
|
|
|
|
|
|
|
|
||||||||||||||||
Передаточная функция разомкнутой системы с корректирующим |
|||||||||||||||||||||||||||||||||||||||||||||
звеном: |
WРАЗ( p) WКЗ ( p) WЭУ ( p) WГ ( p) W |
( p) WТГ ( p) ; |
|
|
|
|
|
(23) |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
W |
|
|
( p) |
k0 (T02 p 1) |
k |
|
|
|
|
|
|
|
|
k1 |
|
|
|
|
|
|
|
|
|
k |
|
k |
|
|
; |
(24) |
|||||||||||||
|
|
РАЗ |
ЭУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
ТГ |
||||||||||||||||||||||||||||
|
|
|
|
T p |
1 |
|
|
|
T |
p2 T |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
T p 1 |
|
|
T |
|
|
p 1 |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
01 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
Я М |
|
|
М |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
И |
||||||||||||
|
|
W РАЗ ( p) |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
(T |
01 |
p 1) |
|
|
|
|
|
|
|
|
|
|
Д(T p 1) (T T p T p 1) |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(T02 p 1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где kРC k0 kЭУ k1 k Д kТГ .
Находим такое значение k0, чтобы статическая ошибка
соответствовала разрешенной: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
f (t) |
|
k f |
MC (t) |
|
|
|
|
|
k f |
MC (t) |
|
; |
(26) |
|||||||
1 |
k |
|
1 |
k |
|
1 k |
|
k |
|
k k |
|
k |
||||||||||||
СТ |
|
РС |
|
РС |
|
0 |
ЭУ |
Д |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
ТГ |
|
|
|||||
|
|
|
|
|
|
|
|
|
k f MC |
(t) |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
СТ |
|
|
1 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
k0 |
|
|
|
|
|
|
|
. |
|
|
|
|
|
(27) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
kЭУ k1 k Д kТГ |
|
|
|
|
|
|
|||||||||
10