Материал: Управляемость автомобиля и безопасность движения
где kу1 и kу2 - коэффициенты сопротивления уводу соответственно переднего и заднего мостов, Н/рад;
M1 и М2 - массы, отнесенные соответственно к переднему и заднему мостам, кг.
При повышении скорости автомобиля углы увода также возрастают. При этом у автомобиля с излишней шинной поворачиваемостью угол δ2 увеличивается быстрее угла δ1. Вследствие этого правая часть выражения (2.7) уменьшается и при некоторой так называемой критической скорости vув оказывается равной нулю. При этой скорости автомобиль начинает двигаться криволинейно, хотя его управляемые колеса находятся в нейтральном положении. Если скорость автомобиля больше vув, то разность δ2 - δ1 > L/Rэ, и угол θ становится отрицательным. Это означает, что для поворота автомобиля вправо передние колеса нужно повернуть влево. Следовательно, автомобиль с излишней шинной поворачиваемостью теряет управляемость, если его скорость больше критической vув.
Для определения критической скорости, приняв угол θ
=0, подставим в формулу
(2.7) разность углов δ1 и δ2 полученную из выражений (2.8) и
(2.9), тогда:
δ2 - δ1=( М2 / kу2 - М1 / kу1)×v2/Rэ = L/Rэ
Следовательно, критическая скорость по условиям увода:
vув= . (2.10)
. (2.10)
У автомобиля с недостаточной или нейтральной шинной поворачиваемостью критическая скорость отсутствует, так как при δ1 =δ2 подкоренное выражение отрицательно и скорость vув, является мнимой величиной, а при δ1=δ2 она равна бесконечности.
Чтобы
обеспечить недостаточную шинную поворачиваемость автомобиля, несколько
уменьшают давление воздуха в шинах передних колес по сравнению с давлением в
шинах задних колес и тем самым снижают коэффициент поворачиваемости (ηпов). Кроме того, центр тяжести автомобиля немного
смещают в сторону переднего моста, что увеличивает часть центробежной силы,
действующую на управляемые колеса.
.3 Устойчивость переднего и заднего мостов
При определении максимально допустимой (критической) скорости, с которой
можно вести автомобиль без поперечного скольжения vск предполагается [7,8,9,10,15], что продольные силы
отсутствуют и оба моста автомобиля скользят в поперечном направлении
одновременно. Такое явление в практике наблюдается редко, обычно раньше
начинают скользить колеса одного из мостов: заднего или переднего. Для качения
колеса без продольного и поперечного проскальзывания необходимы следующие
условия:
Fсц=Rz ×φ≥![]() ,
,
где Rx, Ry, Rz,- касательная, поперечная, нормальная реакция дороги на колесо.
Отсюда:
φ ≥![]() ,
,
где χ= Rx /Rz - удельная касательная реакция, равная для ведущего колеса Fт /Rz, а для тормозного Fтор /Rz; для ведомого колеса χ=f.
Поперечная
составляющая центробежной силы Fy определяет поперечную реакцию дороги на колесо
Fy =M×v2×θ/L= G×v2/(g×R). (2.11)
Подставим
вместо поперечной силы её значение по формуле (2.11),тогда:
φ 2=
χ 2 + (G×v2/(g×R×Rz))2.
Не
учитывая динамических нагрузок на колеса, можно приближенно принять Rz= G.
Следовательно, максимальная скорость, с которой автомобиль может двигаться без
скольжения при совместном действии касательных и поперечных сил,
v![]() =
=![]() .
.
Скорость
v![]() меньше скорости vск,
определенной для случая равномерного движения автомобиля и разгона, примерно на
10…20%. При интенсивном торможении χ ≈ φ, при этом v
меньше скорости vск,
определенной для случая равномерного движения автомобиля и разгона, примерно на
10…20%. При интенсивном торможении χ ≈ φ, при этом v![]() ≈ 0, и даже небольшое отклонение может привести
к заносу.
≈ 0, и даже небольшое отклонение может привести
к заносу.
Аналогично
можно получить формулы, определяющие условия устойчивости переднего и заднего
мостов. Соответствующие критические скорости определяют по формулам:
vск1=![]() ; (2.12)
; (2.12)
vск2=![]() .
.
где m1 и m2 - коэффициенты изменения вертикальных реакций; для двухосных автомобилей при движении под действием силы тяги m1=0.8…0.9; m2=1.05…1.1; при торможении m1=1.2…1.3 и m2=0.7…0.8.
При активных режимах движения у заднеприводных автомобилей χ1˂χ2. При торможении колеса заднего моста разгружаются, а переднего нагружаются и m1> m2 .Поэтому в обоих случаях vск1> vск2 , т.е. наиболее вероятен занос заднего моста.
На
рисунке 2.8, а показан автомобиль, движущийся криволинейно по дуге радиуса R.
Если скорость автомобиля v превышает критическое значение vск2,
то задний мост будет проскальзывать в поперечном направлении с некоторой
скоростью vу2. В результате сложения скоростей задний мост начнет
перемещаться по направлению вектора v3 и радиус уменьшается до R1.
Уменьшение радиуса вызывает увеличение центробежной силы, что в свою очередь
приведет к дальнейшему уменьшению радиуса. При некотором значении радиуса
начнут проскальзывать колеса переднего моста. Однако скорость поперечного
скольжения заднего моста все время будет расти быстрее, и автомобиль будет
двигаться по дуге непрерывно уменьшающегося радиуса. Такое движение автомобиля
называется заносом. Занос чрезвычайно опасен, так как развивается обычно быстро
и может привести к выходу автомобиля за пределы полосы движения или
опрокидыванию.
Рисунок 2.8 Занос переднего и заднего мостов автомобиля
Если vск1<vск2, то при v=vск1 начинается поперечное скольжение переднего моста со скоростью vу1. (рисунок 2.8 б). В этом случае передний мост перемещается по направлению вектора v3. и радиус увеличивается от R до R1. Увеличение радиуса приводит к уменьшению центробежной силы, и скорость vу1 понижается. Следовательно, такой автомобиль не может войти в занос, хотя может частично утратить управляемость.
Чтобы
прервать начавшийся занос, нужно прекратить торможение или подачу топлива,
уменьшив тем самым величину χ. Кроме
того нужно повернуть передние колеса в сторону скольжения заднего моста. Пусть
во время начала заноса передние колеса занимали нейтральное положение и центр
поворота находился в точке O (рисунок 2.8 в). После поворота колес на угол θ центр поворота сместится в точку О1 и радиус поворота
увеличится от от R до R1, а центробежная сила уменьшится.
.4
Оценка управляемости автомобиля ГАЗ-31105
Исходными данными для расчета характеристик управляемости являются:
. Размерные параметры автомобиля ГАЗ-31105 [16]
а) наибольшая ширина ………………Ba=1,846 м;
б) наибольшая высота………………..Ha=1,476 м;
в) база автомобиля……………………L=2,8 м;
г)
площадь лобового сопротивления может быть приближенно определена по выражению
[7]
Aв = αв×Ha× Ba =0,78×1,476×1,846=2,125 м2;
где αв - коэффициент заполнения площади для легковых автомобилей αв = =0,78…0,8. Принимаем αв = 0,78.
. Снаряженная и полная масса автомобиля [16].
а) снаряженная масса
m0=1470 кг;
в том числе на заднюю ось m02=690 кг;
б) полная масса
ma=1870 кг;
в том числе на переднюю ось ma1 = 890 кг;
в том числе на заднюю ось ma2 = 980 кг.
. Координаты центра тяжести [17]
а) высота центра тяжести
hц=0,595 м;
б) расстояние от центра тяжести:
до
передней оси автомобиля
а
=( ma2/ ma)×L=980/1870×2,8 = 1,476 м;
до
задней оси автомобиля
b = L - a =
2,8 - 1,467 = 1,333 м.
. Коэффициент полезного действия трансмиссии [7]
ηт= 0,8…0,92;
Принимаем ηт= 0,92.
. Коэффициент сопротивления воздуха [7]
kв = 0,15…0,35 H×c2/м4;
Принимаем kв = 0,2 H×c2/м4
. Статический радиус колеса. Для шин размером 205/70R14 статический радиус колеса [16]
r = 0,295 м.
. Максимальная мощность двигателя.
Ne max = 77,2 кDт при 4750 об/мин;
. Максимальный крутящий момент двигателя
Ме мах = 182 Н×м при 2500 - 3000 об/мин.
Определим
курсовой угол автомобиля при выполнении первого маневра (своевременный поворот
рулевого колеса и изменение направления движения). Курсовой угол автомобиля при
входе в поворот (γ1) и при выходе из поворота определяются согласно
формулам, приведенным в таблице 2.1:
γ1 = g×φy×T1 /(2×v) и γ2 = g×φy×T1 /v = 2×γ1.
Результаты
расчетов по этим формулам оформляем в виде таблиц 2.3, 2.4, 2.5, 2.6 и 2.7,
рисунков 2.9, 2.10, 2.11, 2.12 и 2.13 соответственно при времени Т1 поворота
рулевого колеса в одну сторону 0,5; 1; 1,5; 2; 3 с. φу = 0,5.
Таблица 2.3
Зависимость курсового угла при входе и выходе из поворота от скорости движения автомобиля при Т = 0.5 с.
|
Скорость движения авт., м/с |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
|
Курсовой угол γ1, рад |
0.245 |
0.123 |
0.082 |
0.061 |
0.049 |
0.041 |
0.035 |
0.031 |
0.027 |
|
Курсовой угол γ2, рад |
0.491 |
0.245 |
0.164 |
0.123 |
0.098 |
0.082 |
0.070 |
0.061 |
0.055 |
Таблица 2.4
Зависимость курсового угла при входе и выходе из поворота от скорости автомобиля при Т = 1 с.
|
Скорость движения авт., м/с |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
|
Курсовой угол γ1, рад |
0.491 |
0.245 |
0.164 |
0.123 |
0.098 |
0.082 |
0.070 |
0.061 |
0.055 |
|
Курсовой угол γ2, рад |
0.981 |
0.491 |
0.327 |
0.245 |
0.196 |
0.164 |
0.140 |
0.123 |
0.105 |
Таблица 2.5
Зависимость курсового угла при входе и выходе из поворота от скорости автомобиля при Т = 1,5 с.
|
Скорость движения авт., м/с |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
|
Курсовой угол γ1, рад |
0.736 |
0.368 |
0.245 |
0.184 |
0.147 |
0.123 |
0.105 |
0.092 |
0.082 |
|
Курсовой угол γ2, рад |
1.472 |
0.736 |
0.491 |
0.368 |
0.294 |
0.245 |
0.210 |
0.184 |
0.164 |
Таблица 2.6
Зависимость курсового угла при входе и выходе из поворота от скорости автомобиля при Т = 2 с.
|
Скорость движения авт., м/с |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
|
Курсовой угол γ1, рад |
0.981 |
0.491 |
0.327 |
0.245 |
0.196 |
0.164 |
0.140 |
0.123 |
0.105 |
|
Курсовой угол γ2, рад |
1.962 |
0.981 |
0.654 |
0.491 |
0.392 |
0.327 |
0.280 |
0.245 |
0.218 |
Таблица 2.7
Зависимость курсового угла при входе и выходе из поворота от скорости автомобиля при Т = 3 с.
|
Скорость движения авт., м/с |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
|
Курсовой угол γ1, рад |
1.472 |
0.736 |
0.491 |
0.368 |
0.294 |
0.245 |
0.210 |
0.184 |
0.164 |
|
Курсовой угол γ2, рад |
2.943 |
1.472 |
0.981 |
0.736 |
0.589 |
0.491 |
0.420 |
0.368 |
0.327 |
Как видим из рисунков 2.9 - 2.13 курсовой угол при входе и выходе из
поворотов возрастает прямо пропорционально времени Т1 первой фазы поворота
(увеличения угла поворота θ управляемых колес) и обратно
пропорционально скорости движения. Так за время Т1=0,5 с при возрастании
скорости движения с 5 м/с до 20 м/с курсовой угол поворота автомобиля при входе
в поворот увеличивается с 0,245 до 0,61 рад. При увеличение времени Т1 с 0,5 до
3 с при скорости движения 20 м/с курсовой угол γ1 при входе в поворот увеличивается с
0,061 рад до 0,368 рад.
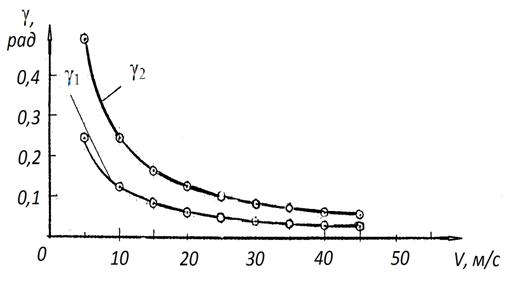
Рисунок 2.9 Зависимость курсового угла γ1 и γ2 от скорости движения при Т1=0,5с
Рисунок 2.10 Зависимость курсового угла γ1 и γ2 от скорости движения при Т1=1с
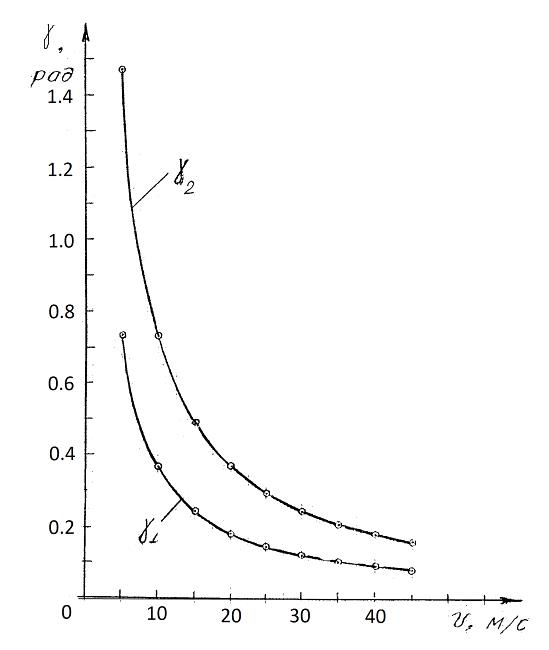
Рисунок 2.11 Зависимость курсового угла γ1 и γ2 от скорости движения при Т1=1,5 с
Таким образом, формулы, приведенные в таблице 2.1 позволяют найти γ, x, y и определить положение автомобиля на дороге в процессе входа в поворот.
Для оценки непосредственно связанной с управляемостью устойчивости переднего и заднего мостов автомобиля рассчитаем и построим график зависимости максимально возможной скорости без скольжения при совместном действии на автомобиль касательных и поперечных сил от удельной касательной реакции колес.
Максимальная скорость, с которой автомобиль может двигаться без
скольжения при совместном действии касательных и поперечных сил, определяется
по формуле:
v![]() =
=![]() . (2.13)
. (2.13)
где χ= Rx /Rz - удельная касательная реакция, равная для ведущего колеса Fт /Rz, а для тормозного Fтор /Rz; для ведомого колеса χ=f. Принимаем R=100 м; φ=0.7.
Результаты расчетов по формуле (2.13) оформляем таблицей 2.8 и рисунком 2.14.
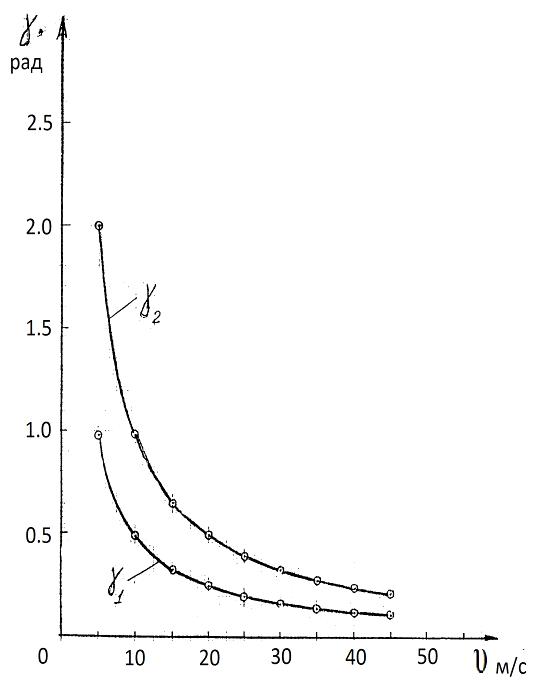
Рисунок
2.12 Зависимость курсового угла γ1 и γ2 от скорости движения при Т1=2,0 с