Материал: Управляемость автомобиля и безопасность движения
Управляемость автомобиля и безопасность движения
Содержание
Введение
. Управляемость автомобиля
.1Основные определения
.2 Увод автомобильного колеса
.3 Поворот автомобиля с эластичными колесами
. Управляемость автомобиля и безопасность движения
.1 Значение управляемости автомобиля для безопасного движения
.2 Поворачиваемость автомобиля
.3 Устойчивость переднего и заднего мостов
.4 Оценка управляемости автомобиля ГАЗ-31105
. Управляемость как эксплуатационное качество, обеспечивающее активную безопасность автомобиля
.1 Влияние технического состояния автомобиля на его устойчивость и управляемость
.2 Влияние эксплуатационных факторов на управляемость и устойчивость
.3 Приемы управления автомобилем в аварийных ситуациях
4. Органы управления
. Оценка экономической эффективности после установления ограничения скорости
6. Экологическое состояние атмосферного воздуха в РК
7. Охрана труда
.1 Общие требования безопасности
8. Пожарная безопасность
.1 Причины пожаров на производственных объектах
.2 Права и обязанности предприятий
.3 Пути эвакуации
. Охрана окружающей среды
.1 Основные направления охраны окружающей среды в промышленности, энергетике и на транспорте
.2 Экологические требования при проектировании, строительстве и эксплуатации промышленных объектов
.3 Выводы об охране окружающей среды в Казахстане
Заключение
Список использованной литературы
Введение
Цель; Проведенные в СНГ исследования показывают, что автомобиль является одним из наиболее опасных транспортных средств.
В большем комплексе мероприятий, по предупреждению ДТП и снижению тяжести их последствий, одной из важных целей является повышение активной, пассивной и послеаварийной безопасности транспортных средств. Как свидетельствует статистика ДТП, около 60 % пострадавших составляет водители и пассажиры транспортных средств. Именно поэтому мероприятиям, направленным на повышение активной, пассивной и послеаварийной безопасности автомобилей и снижение тяжести последствий ДТП, придается большое значение. Следует отметить, что любое улучшение комфорта автомобилей замедляет появление усталости водителя, что повышает безопасность движения [1,2,3].
Задачи; Совершенствование эксплуатационных свойств автомобиля, направленное на предупреждение ДТП и исключение или хотя бы снижение тяжести травм при ДТП, ведется по нескольким направлениям: улучшения управляемости, устойчивости и надежности автомобиля, при передачи части задач водителя по управлению автомобилем автоматическим системам, улучшения условий обитания в кабине автомобиля, придания элементам салона оптимальных форм и свойств, исключающих травмы водителя и пассажира при авариях. Поэтому на основе исследований системы Водитель-Автомобиль и её элементов необходимо придать автомобилю такие эксплуатационные свойства, которые обеспечивали бы уменьшение вероятности ДТП, а в случае их возникновения исключение травм водителя и пассажиров или, хотя бы, снижение их тяжести.
Актуальность; Ввиду того, что основной причиной ДТП является недостаточная надежность действий человека (водителя), выполняющего функции управляющего звена системы и неоптимальные по ряду параметров свойства управляемого звена этой системы - автомобиля, требуется глубокое изучение вопросов управления автомобилем, особенно в аварийных режимах движения и практическое обучение водителей действиям в этих условиях. Должны быть изучены перспективы дальнейшего повышения надежности системы водитель-автомобиль (ВА), в частности, путем передачи части задач водителя автоматическим системам, за счет поддержания необходимых комфортных условий в салоне и оснащения автомобиля достаточным количеством систем бортовой диагностики [4,5,6].
Настоящая дипломная работа выполнена на базе материалов статистики ДТП и учета
движения на дорогах и улицах города Костаная, Костанайского УДП ГДВД Костанайской
области, а также материалов исследования конструктивной безопасности (устойчивости,
управляемости, обитаемости) автомобиля, что довольно актуально.
1. Управляемость автомобиля
.1 Основные определения
Траекторию движения любого автотранспортного средства в общем случае можно рассматривать как криволинейную с непрерывно изменяющейся кривизной. Если кривизна траектории близка к нулю, такое движение условно принято считать прямолинейным [7,8,9].
Криволинейность движения обусловлена необходимостью совершать повороты в соответствии с задаваемой водителем траекторией, а также неизбежным отклонением автомобиля от заданной траектории вследствие действия внешних возмущений [10,11,12].
Криволинейное движение автомобиля характеризуется изменением во времени положения его продольной и вертикальной осей, а также наличием продольных и главным образом поперечных ускорений. Способность автомобиля совершать криволинейное движение оценивается двумя свойствами: управляемостью и устойчивостью.
Управляемость - свойство управляемого водителем автомобиля сохранять в определенной дорожно-климатической обстановке заданное направление движения или изменять его в соответствии с воздействием на рулевое управление.
Устойчивость - свойство автомобиля, характеризующее его способность сохранять заданное направление движения при воздействии внешних сил, стремящихся отклонить его от этого направления. В экстремальных условиях недостаточная устойчивость автомобиля может привести к его заносу и опрокидыванию.
Принципиальное различие между понятиями управляемость и устойчивость заключается в том, что устойчивость охватывает ряд свойств автомобиля, обеспечивающих его движение по заданной траектории без воздействия водителя, а управляемость - при его воздействии.
При движении автомобиль может иметь траекторные и курсовые отклонения. Траекторное отклонение - это отклонение вектора скорости автомобиля от заданного направления. Курсовое отклонение - отклонение продольной оси автомобиля от направления траектории движения. В соответствии с этим принято различать его траекторную и курсовую управляемость и устойчивость. Криволинейное движение автомобиля может совершаться вследствие воздействия водителя на рулевое управление или при фиксированных управляемых колесах. В первом случае управляемость и устойчивость автомобиля условно считаются динамическими свойствами, а во втором - статическими.
Устойчивость автомобиля по ориентации вертикальной оси в продольной и поперечной плоскостях, зависит от продольной и поперечной устойчивости.
Понятия управляемость и устойчивость автомобиля взаимосвязаны, поскольку они определяются в основном одними и теми же конструктивными параметрами автомобиля: компоновкой, особенностями рулевого управления, характеристиками шин, параметрами подвесок. В то же время влияние параметров автомобиля на его управляемость и устойчивость может быть различным. Например, с увеличением момента инерции автомобиля относительно вертикальной оси, проходящей через центр тяжести, улучшается устойчивость автомобиля при прямолинейном движении и в то же время ухудшается управляемость: для изменения направления движения к рулевому управлению необходимо приложить большие усилия. Поэтому выбор параметров автомобиля, обеспечивающих наилучшие характеристики устойчивости и управляемости, является задачей оптимизации [13,14,15].
Колесные транспортные средства могут поворачиваться за счет:
) поворота управляемых колес;
) притормаживания неуправляемых колес одного борта (поворот «по-гусеничному»);
) поворота звеньев машины относительно друг друга (двухзвенные или многозвенные сочлененные машины).
Для автомобилей наиболее характерен первый способ. Управляемые колеса при этом поворачиваются вокруг некоторых вертикальных осей (шкворней).
На рисунке 1.1 изображена схема сил, действующих на автомобиль с передними ведомыми управляемыми колесами при движении по круговой траектории с постоянной малой скоростью (инерционные силы отсутствуют).
От
ведущих колес на раму автомобиля передаются силы тяги F![]() и F
и F![]() равнодействующая которых Fт в первом
приближении считается направленной вдоль продольной оси автомобиля. Эта сила
через раму автомобиля передается на передний мост. В точках контакта
управляемых колес с поверхностью дороги возникают реакции, равнодействующая
которых Rx1 также может считаться направленной вдоль продольной
оси автомобиля. Так как отсутствуют другие силы, равнодействующая Rx1
равна Fт.
равнодействующая которых Fт в первом
приближении считается направленной вдоль продольной оси автомобиля. Эта сила
через раму автомобиля передается на передний мост. В точках контакта
управляемых колес с поверхностью дороги возникают реакции, равнодействующая
которых Rx1 также может считаться направленной вдоль продольной
оси автомобиля. Так как отсутствуют другие силы, равнодействующая Rx1
равна Fт.
Реакция Rx1 может быть разложена на две составляющие Ff и Ry1, направленные соответственно вдоль и перпендикулярно к плоскости колес.
Составляющая
Ff определяется моментом сопротивления качению
Ff =M/r=f ×Rz.
Соответственно,
сила тяги на ведущем мосту при равномерном повороте автомобиля может быть
найдена по выражению:
Fт= Rx1= Ff /cos θ,
где
θ-
угол поворота управляемых колес.
Рисунок 1.1 Схема поворота автомобиля:
а
- с задними ведущими колесами; б - с передними
Из
рассмотрения суммы моментов относительно точки D, лежащей
посередине заднего моста, видно, что Ff создает момент сопротивления
повороту, a Ry1 - поворачивающий момент,
который при равномерном движении равен моменту сопротивления повороту:
Ry1×L×cos θ=
Ff
×L×sin θ.
Поскольку
значение Rx1 ограничено сцеплением (Rx1max=φ×Rz1), a Ry1= =Rx1×sin
θ, в предельном случае
φ×Rz1×cos θ= Mf /r0, (1.1)
где Mf - момент сопротивления вращению колес, обусловленный как сопротивлением качению, так и другими сопротивлениями.
Если
имеет место только сопротивление качению, условие (1.1) записывается в виде:
φ ≥ f /cos θ; φ×cos θ ≥ f . (1.2)
Из выражения (1.2) следует, что поворот автомобиля будет осуществляться в том случае, если коэффициент сопротивления качению управляемых колес будет меньше, чем произведение коэффициента сцепления на косинус угла поворота управляемых колес. Если это условие не будет соблюдено, управляемые колеса будут двигаться юзом и поворот автомобиля не произойдет.
Максимальные углы поворота управляемых колес автомобилей обычно не превышают 35...45°. Коэффициент сцепления на твердой и сухой дороге во много раз превышает коэффициент сопротивления качению. Поэтому управляемость автомобиля в указанных дорожных условиях обеспечивается всегда. Однако на мягких и скользких поверхностях различие в коэффициентах φ и f значительно уменьшается, вследствие чего управляемость автомобиля ухудшается. Это же происходит и при торможении автомобиля: тормозная сила суммируется с силой сопротивления качению колес. При интенсивном торможении, когда полностью используются сцепные свойства дороги, поворот автомобиля становится невозможным [13].
На рисунке 1.1 б показана схема сил при повороте
автомобиля с передними ведущими и управляемыми колесами. В данном случае
поворачивающий момент создается не боковой реакцией, как это имело место в
случае с ведомыми управляемыми колесами, а силой тяги: Мп= Fт ×L×sin
θ. Поэтому у
автомобилей с передними ведущими и управляемыми колесами этот момент всегда
будет создаваться, если ведущие колеса создают силу тяги. Этим и объясняется,
что такие автомобили обладают лучшей управляемостью, чем автомобили с
управляемыми ведомыми колесами, особенно при движении по скользким дорожным
поверхностям, когда боковые реакции дороги ограничиваются сцеплением.
.2 Увод автомобильного колеса
Автомобильное колесо обладает радиальной, тангенциальной и боковой эластичностью. Управляемость и устойчивость автомобиля в значительной степени зависят от боковой эластичности автомобильного колеса.
Если на катящееся, жесткое в боковом направлении колесо действует боковая сила, траектория качения колеса будет оставаться в его продольной плоскости до тех пор, пока боковая сила не станет больше силы сцепления колеса с дорогой. После этого начинается скольжение колеса в боковом направлении. При действии же боковой силы на катящееся эластичное колесо траектория качения колеса отклонится от плоскости колеса на угол, называемый углом бокового увода. Сущность происходящих процессов поясним на схеме, изображенной на рисунке 1.2.
На рисунке 1.2, а показана схема качения эластичного колеса, когда боковые силы отсутствуют. Линия ОА проходит посередине протектора. При качении колеса его точки В и С, находящиеся на этой линии, касаются дороги соответственно в точках В1 и С1, и траектория качения колеса будет располагаться в плоскости симметрии колеса. При действии на колесо боковой силы Fy вертикальная плоскость, проходящая через центр колеса, сместится относительно центра отпечатка на Δ (рисунок 1.2, б), а линия ОА, проходящая посередине протектора, будет изогнутой. Вследствие этого при повороте колеса на некоторый угол точка В войдет в контакт с дорогой в точке В2, а точка С - в С2. При дальнейшем качении колеса все точки, лежащие на середине протектора, будут иметь контакт с дорогой на линии ОК, и траектория колеса (линия ОК) отклонится от плоскости колеса на угол δ.
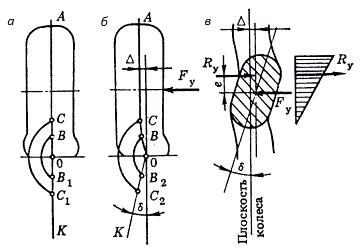
Рисунок 1.2 Схема качения эластичного колеса с уводом
Деформация элементов шины в боковом направлении по длине контакта разная: впереди элементы шины деформированы в боковом направлении меньше, чем в задней части, так как входящие в контакт с дорогой элементы шины в начальный момент практически не воспринимают боковые реакции. По мере поворота колеса эти точки перемещаются к задней части отпечатка. При этом увеличивается деформация элементов шины и, соответственно, возрастает доля боковой силы, воспринимаемой этими элементами. Вследствие этого продольная ось площадки, по которой шина контактирует с опорной поверхностью, оказывается повернутой относительно продольной плоскости колеса на некоторый угол (рисунке 1.2, в). Так как боковая деформация элементов, находящихся в задней части контакта, больше, чем в передней, эпюра боковых давлений будет треугольной формы. Это приводит к тому, что равнодействующая Ry элементарных поперечных реакций, равная силе Fy, оказывается смещенной от центра отпечатка назад на расстояние е. В результате этого создается момент Mс= е ×Ry, стремящийся повернуть колесо в сторону действия боковой силы Fy, называемый стабилизирующим моментом.
Результаты исследований, проведенных в различных странах, позволили установить, что угол увода колеса для определенного состояния шины является функцией боковой силы. В общем случае зависимость между углами увода и боковыми силами нелинейная.
На рисунке 1.3 показана характерная зависимость угла увода от боковой силы. На этой зависимости можно отметить три характерных участка: 0-1 - угол увода зависит линейно от боковой силы; 2-3 - угол увода неограниченно возрастает без увеличения боковой силы; участок 1-2 - переходной.
На участке 0-1 увод автомобильного колеса происходит
только за счет упругой деформации элементов шины. По мере увеличения боковой
силы элементы шины, расположенные в задней части контакта и являющиеся наиболее
нагруженными в боковом направлении, начинают проскальзывать.
Рисунок 1.3 Зависимость угла увода от боковой силы
Это приводит к нарушению пропорциональной зависимости между боковой силой и углом увода (участок 1 - 2). При дальнейшем увеличении боковой силы начинается полное скольжение шины в боковом направлении (участок 2 - 3).
Отношение боковой силы к углу увода, определенное на
линейном участке (0 - 1), называется коэффициентом сопротивления уводу колеса ky:
kу = Fy /δ. (1.3)
Коэффициент сопротивления уводу зависит от ряда факторов, основными из которых являются: размеры и конструкция колеса, давление воздуха в шине, тип и состояние дорожного покрытия, нормальная нагрузка колеса и его окружная сила.
Значения коэффициента ky у шин легковых автомобилей составляют 15...40 кН/рад, а у шин грузовых автомобилей и автобусов 60...120 кН/рад.
Коэффициенты сопротивления боковому уводу находят экспериментально путем испытания шин на стендах или определением углов увода осей автомобилей в процессе их движения. На рисунке 1.4 показана принципиальная схема стенда для определения зависимости боковой силы от углов увода колеса. Испытываемое колесо 1 устанавливается на барабан стенда 2 так, что его ось и ось стенда располагаются под углом δ. При вращении барабана и колеса этот угол соответствует углу увода, поскольку траектория движения колеса относительно барабана лежит в плоскости барабана, а плоскость колеса повернута к плоскости барабана под углом δ.