Материал: Управляемость автомобиля и безопасность движения
В процессе испытаний замеряют боковую силу Fy, действующую на колесо, и угол δ. По этим данным строят зависимости Fy= f (δ), аналогичные показанным на рисунке 1.3. На стендах колесо может испытываться в ведущем, ведомом, нейтральном и тормозном режиме в зависимости от того, какой из электрических двигателей (двигатель барабана 3 или колеса 4) является ведущим. Нагружение колеса обеспечивается грузом 5. Коэффициенты сопротивления уводу, получаемые при испытаниях на таком стенде, вследствие кривизны контактной площадки имеют обычно несколько меньшее значение, чем получаемые при испытаниях на плоских поверхностях.
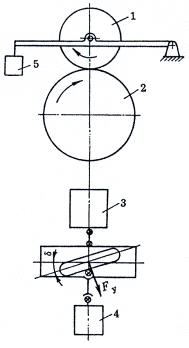
Рисунок 1.4 Принципиальная схема определения
характеристик увода шин на стенде
Ориентировочные значения коэффициентов сопротивления
уводу для шин с диагональным расположением нитей корда могут быть определены по
эмпирической формуле, полученной в НИЦИАМТ:
kу =500×B0×(D0+2×B0×pв+1),
где B0, D0 - ширина и диаметр обода колеса, м;
рв - давление воздуха в шине, МПа.
Устойчивость и управляемость автомобиля в значительной
степени зависят от углов увода мостов, которые определяются уводом шин и
кинематикой подвески. Обычно углы увода мостов определяют экспериментально при
движении автомобиля с различными скоростями по кругу с закрепленным рулевым
колесом. Угол увода моста фиксируется с помощью «пятого колеса» специальной
конструкции (рисунок 1.5). «Пятое колесо» крепится по оси симметрии автомобиля
так, чтобы точка его контакта с дорогой находилась под задним мостом автомобиля
(под осью тележки у трехосного автомобиля). При движении по кругу «пятое
колесо» катится без бокового увода, поскольку инерционные силы, действующие на
него, уравновешиваются противовесом. Поэтому угол между продольной осью
автомобиля и плоскостью, в которой расположено «пятое колесо», является углом
увода. При этом виде испытаний боковыми являются центробежные силы, которые
находятся расчетом по параметрам движения автомобиля или непосредственно
замеряются датчиками ускорений.
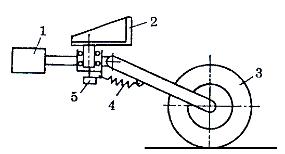
Рисунок 1.5 Прибор «пятое колесо» для определения угла
увода мостов: 1 - противовес; 2 - кронштейн крепления колеса; 3 - колесо; 4 -
прижимная пружина; 5 - потенциометр
.3 Поворот автомобиля с эластичными колесами
При движении автомобиля с жесткими колесами, центр его
поворота определяется точкой 00 (рисунок 1.6) пересечения прямых, являющихся
продолжением осей всех колес, а расстояние от этой точки до продольной
плоскости симметрии автомобиля определяет радиус поворота
R0=L/tg θ (1.4)
где θ - средний угол поворота управляемых колес
В действительности при повороте автомобиля с
эластичными колесами под действием центробежной силы возникает увод каждого
колеса, что приводит к смещению центра поворота. Центр поворота в этом случае
будет лежать на пересечении перпендикуляров, восстановленных из середины
переднего и заднего мостов к направлениям их движения. Радиус поворота
автомобиля в этом случае можно определить из следующих геометрических
соотношений
BD/OD= tg δ2; AD/OD= tg (θ - δ1);=AD+BD= OD×tg (θ - δ1)+OD×tg δ2;=R=L/(tg δ2+ tg (θ - δ1))≈ L/(θ + δ2 - δ1), (1.5)
где δ2 и δ1 - углы увода задних и передних колес.
Из уравнения (1.5) следует, что из-за бокового увода колес действительный радиус R поворота отличается от радиуса R0 и что он при постоянном значении угла θ во многом зависит от соотношения углов увода передней δ1 и задней δ2 осей.
В зависимости от соотношения углов увода δ1 и δ2 различают автомобили с нейтральной, недостаточной и избыточной поворачиваемостью.
У автомобилей с нейтральной поворачиваемостью, углы
увода δ1= δ2 и радиус поворота согласно
выражению (1.4)
R≈L/θ
= R0,
т.е. он приблизительно равен радиусу поворота
автомобиля с эластичными колесами.
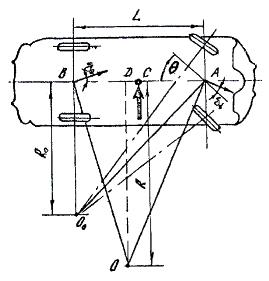
Рисунок 1.6 Схема поворота автомобиля с эластичными
колесами
Автомобили с недостаточной поворачиваемостью имеют
угол увода δ1>δ2. Следовательно, радиус поворота таких автомобилей с
эластичными колесами R>R0, так как
R ≈ L/(θ
+ δ2
- δ1) >L/θ.
Автомобили c излишней поворачиваемостью имеют угол увода
δ1 < δ2 и радиус поворота R<R0, так как
R ≈ L/(θ
+ δ2
- δ1) <L/θ.
Способность сохранять заданное прямолинейное движение
у автомобилей с нейтральной и избыточной поворачиваемостью при воздействии на
них боковой силы различна. Если к автомобилю, обладавшему свойством излишней
поворачиваемостью и движущемуся прямолинейно, приложить боковую силу Fб
(например, составляющую силы тяжести автомобиля), то из-за бокового увода
характер его движения изменится. Автомобиль начнет двигаться по окружности с
центром, расположенным в точке О (рисунок 1.7, a). Но как только прямолинейное
движение перейдет в криволинейное, возникает центробежная сила Fц , которая
будет направлена в ту же сторону, что и боковая сила Fб. Это еще увеличит углы
увода, уменьшит радиус поворота, а следовательно, увеличит центробежную силу,
что снова приведет к увеличению углов увода и т. д. Если при этом водитель не
изменит положения управляемых колес для увеличения радиуса поворота, то может
начаться занос автомобиля.
Рисунок 1.7 Схема движения автомобилей с излишней (а)
и недостаточной (б) поворачиваемостью при действии боковой силы
При действии боковой силы на автомобиль, обладающий свойством недостаточной поворачиваемости, он также из-за увода колес, начнет двигаться по окружности (рисунок 1.7, б). Возникающая при этом центробежная сила Fц будет направлена противоположно действующей силе Fб что приведет к уменьшению углов увода и выравниванию направления движения автомобиля.
При повороте автомобиля наличие увода колес также изменяет характер его движения. В этом случае боковой силой, вызывающей увод колес, будет центробежная сила
Fц =G×v2/(g×R).
Она распределится по осям обратно пропорционально расстояниям этих осей от центра тяжести автомобиля. Каждому значению боковой силы соответствуют определенные углы увода передней и задней осей, а следовательно, и разность этих углов, т.е. δ2 - δ1=f (Fц). Радиус поворота R= L/(θ + δ2 - δ1).
Движение автомобиля на повороте характеризуется вполне определенными соотношениями (связями) между величинами R, θ, v, Fц, δ2 - δ1. Если две из этих величин заданы, то остальные три будут иметь строго конкретные значения.
Скорость, луч которой совпадает с направлением прямолинейного участка зависимости Fц /G =f (δ2 - δ1) (получила название критической по управляемости), делит все поле графика на две части. В первой, расположенной под лучом этой скорости, движение автомобиля возможно, во второй - нет.
Даже при движении по прямой при этой критической скорости (точка начала координат) возможен такой случай, когда внезапно возникающая боковая сила (порыв ветра, наклон дороги и т. д.) вызывает потерю управляемости.
Физический смысл явления объясняется тем, что при кратковременном действии боковой силы из-за увода колес автомобиль начинает двигаться по кривой. Возникающая боковая сила вызывает уменьшение радиуса поворота, дальнейшее увеличение центробежной силы и т. д. до тех пор, пока автомобиль полностью потеряет управляемость.
Величину критической скорости можно определить аналитически, рассмотрев случай прямолинейного движения автомобиля и момента когда, это движение нарушено кратковременной боковой силой. Управляемые колеса находятся в нейтральном положении, т. е. θ =0, следовательно, радиус поворота в данном случае R= L/(θ + δ2 - δ1) ≈ L/(δ2 - δ1).
Величина центробежной силы, возникающей при
криволинейном движении автомобиля с критической скоростью,
Fц =G×v![]() /(g×R).
/(g×R).
Подставляя
в это выражение значение радиуса поворота, получим
Fц =G×v![]() /(g×L)×(δ2 - δ1).
/(g×L)×(δ2 - δ1).
отсюда
критическая скорость движения:
vкр= .
.
Углы
увода δ2 и δ1 могут
быть определены по формулам:
δ1= Fц1 / kу1= Fц×b /(L×kу1); δ2= Fц2 / kу2= Fц×a /(L×kу2),
где Fц1 и Fц2 - составляющие центробежной силы, приходящиеся соответственно на передние и задние колеса автомобиля;
а и b - расстояния от передней и задней осей до центра тяжести автомобиля;
kу1 и kу2 - коэффициенты сопротивления уводу передней и задней осей.
Подставляя
значения углов увода δ1 и δ2 в
выражение для критической скорости, после незначительных преобразований получим
vкр= , (1.6)
, (1.6)
где G1 и G2 - составляющие веса автомобиля, приходящиеся соответственно на переднюю и заднюю оси.
Критической скоростью автомобиля называется такая, при которой автомобиль под влиянием любой, сколь угодно малой боковой силы при не повернутых управляемых колесах начинает двигаться по кривой все уменьшающегося радиуса (по опирали), что приводит к потере управляемости.
Анализ выражения, полученного для критической скорости, позволяет установить следующее.
Увеличение базы автомобиля увеличивает его критическую скорость.
Критическая скорость изменяется в зависимости от распределения веса автомобиля по осям и соотношения коэффициентов сопротивления уводу передней и задней осей. При этом имеют место три возможных случая.
Во-первых, G2 / kу2 = G1 / kу1 → vкр=∞, т.е. в этом случае критическая скорость получается весьма большой и в реальных условиях работы автомобиля невозможна.
Во-вторых, G2 / kу2 < G1 / kу1. Подсчет по формуле (1.6) приводит к получению мнимой величины, т. е. при этом условии (недостаточная поворачиваемость) критическая скорость невозможна вообще.
В-третьих, G2 / kу2 > G1 / kу1. Критическая скорость может иметь определенное значение, при котором достаточно появления сколь угодно малой силы, чтобы автомобиль потерял управляемость.
Таким образом, для получения хорошей управляемости автомобиля нужно, его проектировать так, чтобы было выдержано первое или второе условие.
2.
Управляемость автомобиля и безопасность движения
.1 Значение управляемости автомобиля для безопасного движения
Управляемость оценивают по соответствию параметров движения автомобиля воздействием водителя на рулевое управление. При различных воздействиях степень соответствия может быть различной, что затрудняет выбор единого критерия для комплексной оценки управляемости автомобиля в эксплуатационных условиях.
Поворачивая рулевое колесо, водитель задает новое направление движения автомобиля. При плохой управляемости автомобиля действительное направление движения не совпадает с желательным и необходимы дополнительные управляющие воздействия со стороны водителя. Это приводит к «рысканию» автомобиля по дороге, увеличению динамического коридора и утомлению водителя. При особенно неблагоприятных условиях плохая управляемость может явиться причиной столкновения автомобилей, наезда на пешехода или выезда за пределы дороги.
Подавляющее большинство опасных дорожных ситуаций (до 80...85%) водитель ликвидирует путем своевременного поворота рулевого колеса и изменения направления движения автомобиля. При этом водитель может, либо, повернув автомобиль, отвести его от опасной зоны под углом к прежнему направлению движения, либо выехать в соседний ряд. Первый маневр проще, но его выполнению может помешать недостаточная ширина проезжей части, деревья, столбы и другие препятствия, находящиеся за пределами дороги. Второй маневр можно выполнить на любой двухполосной дороге.
Определим параметры движения автомобиля при первом маневре, считая шины жесткими в боковом направлении. Это позволит ограничиться простыми кинематическими зависимостями.
В положении Ι (рисунок 2.1) водитель замечает
впереди на расстоянии S2
препятствие. На пути Sp (за
время tp) он осознает необходимость маневра и
принимает решение о его выполнении. На пути Sр.у (за время tр.у)
водитель поворачивает рулевое колесо, но автомобиль продолжает двигаться
прямолинейно, так как происходит деформация амортизационных пружин, рычагов и
тяг рулевого управления и положение передних колес не меняется (положение II). Время tp.y - время
запаздывания рулевого управления - составляет в среднем 0,15…0,35 с. В
положении III автомобиль начинает двигаться
криволинейно. При этом водитель поворачивает колеса вначале в одну сторону, и
угол θ увеличивается (время Т1). В опасных
ситуациях после поворота колес на угол θ1 водитель сразу поворачивает их
обратно, вследствие чего угол θ уменьшается (время Т2). В положении IV θ=0, и автомобиль движется прямолинейно
под углом γм к прежнему направлению движения. Безопасность поворота
будет обеспечена, если в конце маневра между автомобилем и препятствием
останется некоторый интервал Δ. Согласно рисунку 2.1,а можно
написать:
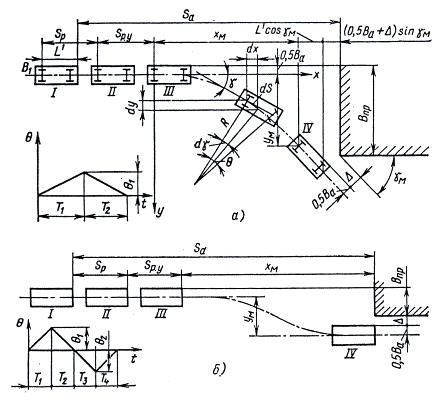
Рисунок 2.1 Схемы для расчета маневра автомобиля:
а - при неограниченной ширине препятствий; б - при
смене полосы движения
Sa = Sp - L' + Sp.у + xм + L' ×cos γм + (0,5×Ba +Δ)×sin γм;
yм + 0,5×Ba+ L'×sin γм = Bпp + (0,5×Ba + Δ)×cos γм,
где L' - расстояние от заднего моста до передней части автомобиля;
xм и yм - продольное и поперечное перемещения автомобиля в процессе маневра;
Bпр - ширина препятствия.
Приняв приближенно sin γм ≈ γм и cos γм = 1. получим условия безопасного
маневра:
xм ≤ Sa - Sp - Sp.y + (0,5×Ba+Δ) γм ;
yм ≥ Впр +Δ - L× γм.
Чтобы определить параметры криволинейного движения,
проведем оси координат х и у так, чтобы начало системы координат совпадало с
серединой заднего моста автомобиля в положении III. В некоторый момент времени t автомобиль, двигаясь криволинейно, повернется относительно
оси х на угол γ. После поворота его еще на бесконечно малый угол dγ середина заднего моста опишет дугу dS = R×dγ. При движении автомобиля с
постоянной скоростью v
длина дуги dS = v×dt. Учитывая равенство (1.4), имеем:
dγ = dS/R - v×dt/R = v×θ×dt/L.
Закон
изменения угла γ по
времени зависит от водителя и может быть различным. Примем для простоты, что
угловая скорость поворота передних колес постоянна (![]() =const) и в первой фазе поворота (время Т1) угол θ изменяется прямо пропорционально времени:
=const) и в первой фазе поворота (время Т1) угол θ изменяется прямо пропорционально времени:
θ = ![]() ×t.
×t.
При
этом допущении курсовой угол прямо пропорционален квадрату времени:
γ= v×![]() ×∫ t×dt/L= v×
×∫ t×dt/L= v×![]() ×t2 /(2×L).
(2.1)
×t2 /(2×L).
(2.1)
В
эксплуатационных условиях максимальное значение курсового угла обычно не
превышает 10...15°. Для таких значений γ изменение координат х и у точки B1 за
время dt определяется формулами:
dx=dS×cos γ
≈ dx; dy=
dS×sin γ
≈dS×γ =v×dt×γ.
Следовательно, координаты точки В1, в момент времени t имеют следующие значения:
x=∫ v×dt = v×t; (2.2)
y=(v2×![]() ×∫ t2×dt) /(2×L)= v2×
×∫ t2×dt) /(2×L)= v2×![]() ×t3/(6×L) (2.3)
×t3/(6×L) (2.3)
Формулы (2.1) - (2.3) позволяют найти γ, х и у и определить положение автомобиля на дороге в процессе входа в поворот.
Величина
угловой скорости ![]() ограничена, с одной стороны, психофизиологическими
возможностями водителя и находится в следующих пределах, рад/с:
ограничена, с одной стороны, психофизиологическими
возможностями водителя и находится в следующих пределах, рад/с:
Для легковых автомобилей............................................................0,2 - 0,3
Для грузовых автомобилей и автобусов.....................................0,15 - 0,3
С
другой стороны, скорость ![]() не может быть особенно большой по соображениям
безопасности. Выполняя маневр, водитель должен избегать заноса или опрокидывания.
не может быть особенно большой по соображениям
безопасности. Выполняя маневр, водитель должен избегать заноса или опрокидывания.
Потеря
устойчивости автомобилем наиболее вероятна в середине маневра (при θ = θ1), где
кривизна траектории максимальна. Из условия равенства центробежной силы и силы
сцепления на этом участке имеем