Материал: Управляемость автомобиля и безопасность движения
M×v2/R= M×v2/L×θ1=G×v2/g×L×![]() ×T1=G×φy. (2.4)
×T1=G×φy. (2.4)
Отсюда
максимально допустимая угловая скорость поворота передних колес по условиям
сцепления:
![]() = L×G×φy /( v2×T1).
= L×G×φy /( v2×T1).
Подставив
значение ![]() в формулы (2.1) и (2.2), получим выражения для
определения параметров γ1, х1 и у1 в середине маневра (таблица 2.1). Проведя
аналогичные вычисления для второй фазы маневра - выхода автомобиля из поворота,
получим формулы для параметров γм, хм и ум конца второй фазы - выхода автомобиля из поворота.
в формулы (2.1) и (2.2), получим выражения для
определения параметров γ1, х1 и у1 в середине маневра (таблица 2.1). Проведя
аналогичные вычисления для второй фазы маневра - выхода автомобиля из поворота,
получим формулы для параметров γм, хм и ум конца второй фазы - выхода автомобиля из поворота.
Таблица 2.1
Параметры движения автомобиля при маневрах
|
Маневр |
γ |
x |
y |
|
Вход в поворот |
γ1=g×φy×T1/(2×v) |
x1=v×T1 |
y1=
g×φy×T |
|
Выход из поворота |
γ2=g×φy×T1/v=2×γ1 |
x2=2×v×T1=2×x1 |
y2=g×φy× T |
Смена
полосы движения γм=0 xм=4×v×T1 yм=2× g×φy× T![]() =
=
|
=g×φy×x |
Выполняя маневр второго типа - смену полосы движения, водитель должен повернуть рулевое колесо несколько раз (рисунок 2.1, б), Сначала он поворачивает его на угол θ1 в одну сторону, затем на угол, равный 2×θ1 в другую сторону и, наконец, возвращает колеса в нейтральное положение. Весь маневр, состоящий в этом случае из четырех периодов Т1 - Т4, требует от водителя точного расчета и большего числа действий на том же пути, чем при маневре первого типа. Зато при выполнении маневра второго типа автомобиль меньше смещается в поперечном направлении, и проезжая часть дороги может быть значительно уже. В конце маневра курсовой угол равен нулю и автомобиль движется параллельно прежнему направлению движения.
Формулы для расчета параметров маневра второго типа также даны в таблицу 2.1.
Изложенный выше анализ маневра проведен для элементарной расчетной схемы, в которой не учитываются многие конструктивные и эксплуатационные факторы. Параметры движения реального автомобиля могут значительно отличаться от расчетных данных, поэтому последние обычно используют лишь для сравнения различных вариантов маневра.
.2 Поворачиваемость автомобиля
Поворачиваемостью называют свойство автомобиля изменять направление движения без поворота управляемых колес. Есть две основных причины поворачиваемости: увод колес, вызываемый поперечной эластичностью шин, и поперечный крен кузова, связанный с эластичностью подвески. Соответственно различают шинную и креновую поворачиваемость автомобиля.
Уводом называют качение колеса под углом к своей
плоскости. При действии на колесо с эластичной шиной поперечной силы Ру вектор
скорости центра колеса отклоняется от плоскости вращения на некоторый угол δ
- угол увода. Сила Ру и
угол увода δ связаны следующей зависимостью:
Pу = kу×δ, (2.5)
где kу - коэффициент сопротивления уводу (первая производная от поперечной силы по углу увода), Н/рад.
Величина kу зависит от многих факторов, из которых наибольшее значение имеют величина
угла увода, вертикальная и касательная силы, приложенные к колесу, и наклон
колеса к вертикали. Считая, что эти факторы действуют независимо один от
другого, их влияние на kу
учитывают экспериментальными поправочными коэффициентами. С учетом этих коэффициентов
формула (2.5) принимает следующий вид:
Ру=q1×q2×q3×q4× kу max×δ,
где q1 и q2 - коэффициенты, учитывающие изменение вертикальной и касательной сил, действующих на колесо;
q3 - коэффициент, учитывающий изменение угла наклона колеса;
q4 - коэффициент, учитывающий влияние угла δ и характера опорной поверхности;
kу max - максимальный коэффициент сопротивления уводу при изменении вертикальной нагрузки и малых величинах δ.
Экспериментальные зависимости угла δ от Ру для некоторых шин показаны на рисунке 2.2. Эти зависимости имеют сложный характер, однако при малых углах увода их можно приближенно считать линейными, а коэффициент kу постоянным.
При наличии увода центр поворота автомобиля находится не в точке О, как у автомобиля с жесткими шинами (рисунок 2.3, а в точке О1, т. е. в месте пересечения перпендикуляров к векторам скоростей v1 и v2.
Для автомобиля с жесткими шинами δ1 = δ2 = 0 и для радиуса получаем формулу (1.4).
Таким образом, траектория движения автомобиля с
жесткими шинами зависит только от угла θ. У автомобиля c эластичными шинами на нее влияют
углы увода, которые в свою очередь зависят от θ, v и других факторов. При наличии увода
автомобиль может двигаться криволинейно, даже при θ
= 0. Кривизна траектории
зависит от соотношения углов δ1 и δ2. Если δ1= δ2, то шинную поворачиваемость
автомобиля называют нейтральной.
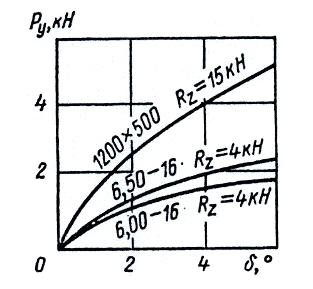
Рисунок 2.2 Зависимости угла увода δ
от поперечной силы Ру
для автомобилей с различными шинами
Рисунок 2.3 Схема движения автомобиля с эластичными
шинами
Хотя при этом согласно формуле (1.4) Rэ = R, но траектория движения автомобиля c жесткими шинами не совпадает с траекторией движения автомобиля, имеющего нейтральную поворачиваемость, так как центры поворота в этих случаях занимают различные положения.
В случае действия поперечной силы на автомобиль, имеющий жесткие шины, он сохраняет прежнее направление движения, пока эта сила по величине не станет равной силе сцепления. Автомобиль, имеющий нейтральную шинную поворачиваемость, под действием поперечной силы движется под углом δу к прежнему направлению движения.
Если δ1 > δ2, то Rэ > R, и
для движения автомобиля с эластичными шинами по кривой радиусом Rэ управляемые колеса нужно повернуть
на больший угол, чем при жестких шинах. В этом случае шинную поворачиваемость
автомобиля называют недостаточной. Под действием поперечной силы Ру (рисунок
2.4, а) при прямолинейном движении передняя ось автомобиля с недостаточной
поворачиваемостью в результате увода, движется под углом δ1 к прежнему направлению движения, а
задний мост - под углом δ2. Автомобиль поворачивается вокруг центра О1,
вследствие чего возникает центробежная сила Рц, поперечная составляющая Рцу
которой направлена в сторону, противоположную силе Ру, что уменьшает
результирующую поперечную силу и увод колес. Следовательно, автомобиль с
недостаточной шинной поворачиваемостью устойчиво сохраняет прямолинейное
направление движения.
Рисунок 2.4 Схемы движения автомобиля с различной шинной поворачиваемостью:
а - с недостаточной; б - с излишней
Если угол δ1<δ3, то Rэ<R, и для движения автомобиля с эластичными шинами по кривой радиусом R управляемые колеса нужно повернуть на меньший угол, чем при жестких шинах. В этом случае шинную поворачиваемость автомобиля называют излишней. Если на автомобиль с излишней поворачиваемостью действует центробежная сила Рц, то он тоже движется криволинейно (рисунок 2.4, б). Однако составляющая Pцу в этом случае направлена в ту же сторону, что и сила Ру. В результате увод возрастает, что увеличивает кривизну траектории и силу Pцу и т. д. Если водитель не повернет управляемые колеса в нужном направлении, то центробежная сила Рц может возрасти настолько, что автомобиль потеряет устойчивость. Таким образом, автомобиль с недостаточной поворачиваемостью более устойчив и лучше сохраняет направление движения, чем автомобиль с излишней поворачиваемостью.
Для количественной оценки шинной поворачиваемости
автомобиля служит коэффициент поворачиваемости:
ηпов=(G2/kу2)/(G1/kу1)= G2×kу1/ (G1×kу2),
где kу1 и kу2 - коэффициенты сопротивления уводу переднего и заднего мостов автомобиля.
При излишней шинной поворачиваемости автомобиля ηпов>1,при нейтральной ηпов = 1, а при недостаточной ηпов < 1. Значения ηпов для некоторых отечественных
автомобилей приведены в таблице 2.2, свидетельствующей о том, что большинство
автомобилей имеют недостаточную шинную поворачиваемость в ненагруженном
состоянии. При полной нагрузке, напротив, автомобили имеют излишнюю
поворачиваемость. Показатель ηпов является приближенным, так как в
процессе движения автомобиля коэффициент kу меняется в широких пределах.
Таблица 2.2
Коэффициенты шинной поворачиваемости
|
Автомобиль |
без нагрузки |
с полной нагрузкой |
Автомобиль |
без нагрузки |
с полной нагрузкой |
|
ЗАЗ-969 «Запорожец» |
1,36 |
1,15 |
ГАЗ-14 «Чайка» |
0,85 |
1,08 |
|
|
|
|
ЗИЛ-118 |
0,96 |
1,10 |
|
ВАЗ-2109 «Жигули» |
0,84 |
1,10 |
УАЗ-452 |
0,78 |
1,38 |
|
|
|
|
ГАЗ-4509 |
0.61 |
1,26 |
|
«Москвич-2140» |
0,87 |
1,17 |
ЗИЛ-4331 |
0,51 |
1,35 |
|
ГАЗ-31105 |
0,89 |
1,10 |
МАЗ-5336 |
0,43 |
1,04 |
Креновая поворачиваемость автомобиля связана с конструкцией его подвески. На рисунке 2.5 показан задний мост с рессорной подвеской автомобиля, который совершает правый поворот. Передние концы рессор соединены с кузовом простым шарниром, а задние - с помощью серьги. При прогибах рессоры задний мост перемещается по дуге mm, причем ось его качания расположена около шарнира. Под действием поперечной силы Рку кузов автомобиля наклоняется, вызывая сжатие левых рессор и распрямление правых. Левая рессора, сжимаясь, перемещает задний мост назад (в точку А), а правая, распрямляясь, перемещает его вперед (в точку В). В результате задний мост поворачивается в горизонтальной плоскости, как показано штриховой линией.
Если углы поворота переднего и заднего мостов не
одинаковы по величине или направлению, то автомобиль вследствие крена
поворачивается, хотя передние колеса остаются в нейтральном положении. Так, при
действии одной и той же возмущающей силы Ру автомобиль А (рисунок 2.6)
повернется вправо, а автомобиль Б - влево.
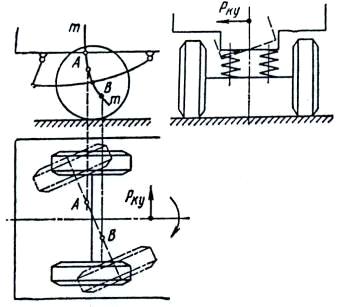
Рисунок 2.5 Поворот заднего моста при крене кузова
Возникающая при повороте центробежная сила Рц у
автомобиля А направлена в противоположную сторону по сравнению с возмущающей
силой Ру, а у автомобиля Б в ту же сторону. Поэтому автомобиль А лучше
сохраняет направление движения под действием поперечных возмущающих сил.
Рисунок 2.6 Схемы движения автомобилей с зависимой
рессорой подвеской, имеющих различную креновую поворачиваемость
По аналогии с шинной поворачиваемостью можно сказать, что автомобиль А имеет недостаточную, а автомобиль Б излишнюю креновую поворачиваемость.
У автомобиля с излишней креновой поворачиваемостью, на который действует поперечная сила, кривизна траектории непрерывно увеличивается. Это приводит к росту центробежной силы и дальнейшему уменьшению радиуса поворота. Однако максимальное значение угла поперечного крена обычно ограничено упорами, предусмотренными в конструкции подвески. Поэтому креновая поворачиваемость не может увеличиваться беспредельно.
Креновая поворачиваемость автомобиля тесно связана с
шинной поворачиваемостью, так как увод колеса возникает не только под действием
сил и моментов, но и при наклоне колеса к вертикали (развале). Если направление
поперечной силы совпадает с направлением развала колеса, то увод возрастает.
Развал колеса, равный 1°, вызывает увод на угол 10...20'. У автомобилей с
независимой подвеской колес на поперечных рычагах крен кузова вызывает
изменение развала колеса. При двухрычажной подвеске (рисунок 2.7) колеса
наклоняются в сторону крена кузова в направлении действия поперечной силы Ру,
что увеличивает угол увода моста. При однорычажной подвеске (рисунок 2.7,б)
колеса наклоняются в сторону, противоположную крену кузова, навстречу поперечной
силе. В этом случае угол увода моста уменьшается. Таким образом, в зависимости
от конструкции подвески, креновая поворачиваемость может либо усиливать, либо
ослаблять влияние шинной поворачиваемости.
Рисунок 2.7 Схемы движения автомобилей с независимой рычажной подвеской, имеющих различную креновую поворачиваемость
автомобиль управляемость безопасность эксплуатационный
Для обеспечения недостаточной поворачиваемости автомобиля необходимо, чтобы угол увода переднего моста был больше угла увода заднего моста. Поэтому у легковых автомобилей наиболее распространена передняя независимая подвеска на двух рычагах. Заднюю подвеску выполняют зависимой или же независимой на одном поперечном рычаге. Никогда не применяют однорычажную подвеску для переднего моста и двухрычажную для заднего, так как это приводит к резкому ухудшению управляемости автомобиля.
Вследствие большого числа факторов, влияющих на управляемость, фактическая траектория автомобиля может существенно отличаться от расчетной. Так, например, при смене полосы движения расстояние хм, необходимое для смещения автомобиля в поперечном направлении на величину ум, больше, чем определенное по формуле, приведенной в таблице 2.1. Расхождение расчетных и экспериментальных значений зависит от скорости автомобиля, сцепления шин с дорогой и других причин. Поскольку расчет траектории с учетом всех факторов трудоемок, то в практике поперечное смещение автомобиля определяют, считая шины жесткими, а расстояние хм уточняют, применяя поправочный коэффициент kм. Этот коэффициент показывает, во сколько раз фактический путь маневра хф больше расчетного:
kм =хф/хм > 1.
Коэффициент маневра определяют по эмпирическим формулам:
ü для сухого асфальтобетона……………….......kм =1,12 + 0,005×v
ü для мокрого…………………………….…..…..kм =1,05 + 0,005×v
ü для гололеда……………….….kм =1,0 + 0,0033×v
В [15] была получена формула, определяющая максимальную скорость vск1 автомобиля без поперечного скольжения передних колес. Эту скорость называют критической по условиям управляемости. Если действительная скорость автомобиля превысит критическую, то, как установлено выше, заноса не произойдет, однако автомобиль частично утратит управляемость. При постоянной скорости водитель поворотом рулевого колеса не сможет уменьшить радиуса кривой. При увеличении скорости автомобиля и неизменном положении передних колес радиус кривой автоматически возрастает вследствие поперечного проскальзывания шин по дороге. Критическая скорость автомобиля по управляемости уменьшается при снижении коэффициента сцепления. Поэтому потеря управляемости наиболее вероятна в случае движения автомобиля по мокрым и скользким покрытиям.
Автомобиль может также утратить управляемость
вследствие увода шин. Чтобы объяснить это положение, определим из формулы (1.5)
угол поворота управляемых колес (в рад):
θ=(L/Rэ) - (δ2 - δ1). (2.7)
Углы увода δ1 и δ2 пропорциональны поперечным силам
Ру1 и Pу2, которые в свою очередь
пропорциональны квадрату скорости:
δ1=Ру1/kу1=М1×v2/(Rэ×kу1); (2.8)
δ2=Ру2/kу2=М2×v2/(Rэ×kу2). (2.9)