Материал: Строительные машины (в вопросах и ответах)
ваются между основными двигателем и трансмиссией машины. Принцип действия таких передач основан на гидродинамической (т.е. через жидкость) связи между их ведущими и ведомымиэлементами.
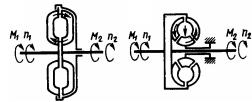
Гидромуфта включает в себя ведущее насосное и ведомое турбинное колеса со спиральными лопастями, которые установлены соответственно на ведущем и ведомом валах и разделены между собой небольшим зазором. Колеса заключены в кожух, заполненный маслом (рабочей жидкостью). При вращении ведущего вала лопасти насосного колеса сбрасывают рабочую жидкость на лопасти турбинного колеса, заставляя его вращаться в том же направлении. С лопаток турбинного колеса рабочая жидкость возвращается в насосное колесо, образуя замкнутый круг. Гидромуфты характеризуются примерным равенством крутящих моментов на ведущем и ведомом валах и надежно предохраняют двигатель машины от перегрузок.
аб
Рис. 31. Гидродинамические передачи: а – гидромуфта; б – гидротрансформатор
Гидротрансформатор помимо насосного и турбинного колес имеет промежуточное направляющее неподвижное колесо (реактор). Реактор воспринимает разность крутящих моментов насосного и турбинного колес и обеспечивает получение реактивного момента, воздействующего на турбинное колесо. Таким образом, на выходной вал гидротрансформатора действуют два момента – крутящий момент приводного вала, передаваемый через поток жидкости, и реактивный момент, в сумме превышающие момент на приводном валу. При уменьшении частоты вращения турбинного колеса с увеличением внешней нагрузки автоматически повышается реактивный и, следовательно, суммарный крутящий момент на выходном валу.
36
Отношение максимального крутящего момента к моменту двигателя, называемое коэффициентом трансформации, составляет 2,5…3,5. Применение гидротрансформаторов позволяет предохранять двигатели и трансмиссии машин от перегрузок, улучшить эксплуатационные качества машин, автоматизировать их работу и повысить производительность.
16. Каковы принципы построения систем управления строительными машинами?
Системы управления строительными машинами по конструктивным признакам разделяют на механические, гидравлические, пневматические, электрические и смешанные (комбинированные).
Механическая система обеспечивает связь руки или ноги машиниста с муфтами и тормозами через рычаги и тяги. Однако у нее есть существенные недостатки:
−необходимость приложения значительных мускульных усилий машиниста к рычагам и педалям;
−быстрая утомляемость машиниста, ведущая к снижению производительности машины;
−необходимость частых смазок и регулировок шарнирных соединений тяг и рычагов.
Обычно механическая система управления используется как вспомогательная – для управления механизмами, не принимающими участия в выполнении рабочего процесса.
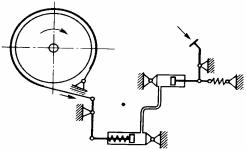
Рис. 32. Гидравлическое безнасосное управление
37
В гидравлической системе управления рычаги заменены исполнительными гидроцилиндрами одно- и двустороннего действия, создающими необходимое усилие включения муфт, тормозов и других механизмов.
Различают насосную и безнасосную (рис. 32) системы управления. В насосной системе рабочая жидкость подается под давлением в исполнительный гидроцилиндр от насоса через распределитель, которым управляет машинист, т.е. точно так же, как в силовом гидроприводе. В безнасосной системе давление рабочей жидкости в исполнительном гидроцилиндре одностороннего действия создается перемещением поршня гидроцилиндра-преобразователя, на который через рычаг или педаль воздействует машинист.
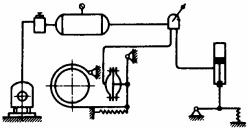
Пневматическая система управления (рис. 33) отличается от гидравлической насосной тем, что в ней вместо жидкости используется сжатый до 0,7…0,8 МПа в компрессоре воздух. По сравнению с гидравлической пневматическая система управления обеспечивает более высокую плавность включения.
Рис. 33. Пневматическое управление
Основные ее недостатки – сравнительно большие размеры исполнительных органов из-за низкого давления в системе и возможность замерзания конденсата, содержащегося в сжатом воздухе.
Электрическая система управления применяется в машинах с индивидуальным электрическим приводом механизмов и обеспечивает пуск и останов электродвигателей, регулирование частоты вращения, реверсирование и т.д. В состав такой системы входят маг-
38
нитные пускатели, контроллеры, реле различных типов, автоматические выключатели, блокирующие устройства, тормозные электромагниты. Электрические системы управления надежны, просты и удобны в эксплуатации, обеспечивают дистанционное управление механизмами и всей машиной в целом, создают возможность автоматизации работы машин.
С целью частичной или полной автоматизации управления машинами применяют комбинированные системы – гидропневматические, гидроэлектрические, гидропневмоэлектрические и др.
17. Каковы перспективы и направления автоматизации систем управления строительными машинами и технологическими процессами?
Автоматизация строительных и дорожных машин ведется в основном по трем направлениям: управление пространственным положением рабочих органов машин, оптимизация наиболее энергоемких режимов работы машин и создание на основе лазерной техники комплексной автоматизированной системы управления технологическими процессами в строительстве.
Первое направление автоматизации – повышение планирующих свойств машин для получения заданных профиля и уклона поверхности, так как эти виды работ требуют значительных затрат времени и трудоемкости, а невыполнение требований существенно снижает качество работ, вызывает перерасход материалов. Автономные системы обеспечивают контроль положения рабочих органов относительно вертикали с помощью бортовых датчиков, обычно маятникового типа.
Второе направление – автоматизация наиболее энергоемких технологических процессов, позволяющих максимально использовать тяговые возможности машин, снизить расход топлива, износ ходовой части, облегчить труд машиниста.
Третье направление автоматизации машин является наиболее прогрессивным и нацелено на совершенствование технологии и организации строительных работ путем создания на базе лазерной и микропроцессорной техники комплексной системы дистанционного программного или автоматического управления машинами.
39
18. Каковы технико-экономические показатели строительных машин?
При выборе машин для производства строительных работ определенного вида и объема за основу принимают их технико-эксплуа- тационные и технико-экономические показатели, при сопоставлении которых находят оптимальные типоразмеры и количество машин для выполнения требуемых технологических операций.
Основным технико-эксплуатационным показателем строительных машин является их производительность.
Производительность определяется количеством продукции, выраженным в определенных единицах измерения (тонна, кубометр, квадратный метр, метр и др.), которую машина вырабатывает, перерабатывает или перемещает за единицу времени – час, смену, месяц или год.
Различают три категории производительности машин: конструктивную, техническую и эксплуатационную.
Конструктивная производительность Пк – это максимально возможная производительность машины, полученная за один час непрерывной при расчетных условиях работы, скоростях рабочих движений, нагрузках на рабочий орган с учетом конструктивных свойств машины и высокой квалификации машиниста.
Для машины периодического действия
Пк = qn или Пк = qnρ,
где q – расчетное количество материала, вырабатываемого машиной
за один цикл работы, м3 или т; |
|
|
|
n – расчетное число циклов работы машины в час, n = |
3600 |
; |
|
T |
|||
|
|
||
|
ц |
|
Тц – расчетная продолжительность цикла, с; ρ – плотность материала, т/м3.
Для машин непрерывного действия при перемещении насыпных материалов сплошным непрерывным потоком
40