Материал: РНП ЛР 6-8
Рис. 10. Обобщенная структурная схема АП
В зависимости от назначения в наиболее сложной АП могут производится высокоточные навигационные определения координат места и составляющих скорости, а также поправок времени и частоты, а в наиболее простой навигационные определения координат места с пониженной точностью. Для высокоточных определений АП должна производить прием С/А- и Р-сигналов на частотах L1 и L2, а пониженной точности - С/А-сигналов на одной частоте L1. Большая роль в АП отводится вычислительному устройству, прием в наиболее сложной АП предусматривается система матообеспечения, которая позволяет автоматически решать основные задачи, относящиеся как к первичной, так и ко вторичной обработке.
Таким образом, вычислительное устройство выполняет часть функций приёмника. При использовании микропроцессорной техники управляющий процессор входит в состав приёмника. Организация последовательности вычислений и обмена информацией между отдельными блоками осуществляется с помощью управляющей программы - диспетчера. Разработка этой программы, как и всего математического обеспечения, в целом, производится с учетом требований по точности и надежности навигационных определений и с учетом возможностей используемых вычислительных средств. После проверки работоспособности АП и ввода необходимого объёма начальных данных первой рабочей операцией выполняемой в аппаратуре, является выбор рабочего созвездия спутников. Это необходимо для определения радиовидимых спутников и выбора из них созвездия КА позволяющего с минимальными значениями геометрического фактора производить навигационные определения.
41
Выбор рабочего созвездия спутников производится по данным действующего альманаха, приближенным координатам места потребителя и текущему времени в масштабе суток. При этом вычислитель производит пересчет альманаха на текущий момент времени с целью определения возможности радиовидимости каждого спутника. По этим эфемеридам, руководствуясь принятым критериям, производится выбор оптимального рабочего созвездия КА. Наиболее простая схема выбора созвездия состоит в том, что один из четырех КА выбирают в близи зенита, а три других - как можно ближе к радиогоризонту, с максимальным взаимным разносом. Зенитный спутник позволяет хорошо определить высоту объекта, а остальные - его плановые координаты. Точность расчета эфемерид спутника зависит от времени последнего их обновления в альманахе. Следующей операцией выполняемой АП, является расчет для выбранных К А данных целеуказания. Она рассчитывается для ускорения поиска сигналов КА и ввода в следующий режим измерителей радионавигационных параметров. Расчет этих данных производится по хранящемуся в памяти альманаху и по приблизительным данным о собственных координатах и скорости объекта.
Размеры области поиска сигнала зависят от погрешностей данных, принятых в навигационном сообщении (эфемерид, ухода бортовой шкалы времени относительно системного времени), и от априорных погрешностей в знании параметров движения потребителя. Наибольшим препятствием к сокращению области поиска являются погрешности в априорном знании координат потребителя. Вся процедура поиска сигнала заключается в начале в поиске по частоте, и задержке С/А-сигнала (кода), а затем, если необходимо, - в допоиске по задержке Р-сигнала (кода). Для проведения поиска в вычислителе рассчитываются априорные значения доплеровского сдвига частоты и задержки сигнала для каждого спутника рабочего созвездия. Эти данные позволяют настроить приемник.
Расчет значения доплеровского сдвига частоты необходим, поскольку в полосе частот, равной максимальному значению доплеровского сдвига +/– 5 кГц (для медленно движущегося потребителя), или +/–11 кГц (для быстро движущегося потребителя), отношение сигнал/шум оказывается малым. Поэтому, с целью более эффективного уменьшения времени поиска сигнала, частотный диапазон поиска подразделяется на поддиапазоны, а поиск производится последовательным просмотром поддиапазонов, начиная с наиболее вероятного, который определяется расчетом априорного значения доплеровского сдвига.
После окончания синхронизации по кадру начинает в результате слежения за сигналом С/А на частоте L1, автоматически устанавливаться нужная фаза местного генератора Р-кода, что практически равносильно завершению поиска по задержке Р-сигнала на частоте L1 (или L2). При подтверждении синхронизации по принятому Р-сигналу производится переключение в режим слежения по этому сигналу. Для решения навигационной задачи по данным эфемеридных параметров, принятым в навигационном сообщении или введённым с блока управления и индикации
42
вручную, вычисляются координаты КА на моменты радионавигационных измерений. Эфемеридные параметры рассчитываются на земле по наиболее точным модулям лишь на дискретные моменты времени. Поэтому в АП необходимо проводить самостоятельный прогноз эфемерид на интервале от момента их задания до момента измерений.
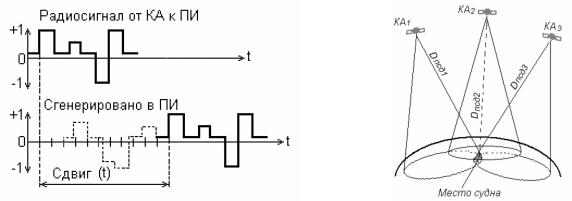
Навигационные сигналы передаются на двух частотах 1575 и 1227 МГц. Использование двух частот позволяет практически исключить ошибки, вызванные ионосферными эффектами. В аппаратуре производятся измерения интервала времени прохождения сигнала на трассе ИСЗ - объект. Временной интервал определяется величиной фазового сдвига между двумя псевдошумовыми последовательностями, генерируемыми как в аппаратуре ИСЗ, так и в аппаратуре потребителя.
В аппаратуре потребителя производится сдвиг кодовой последовательности и до тех пор, пока не будет достигнуто максимальное значение корреляции между обеими последовательностями.
Временной сдвиг между опорными кодами определяет величину временного интервала, который в свою очередь характеризует псевдодальность
(см. рис. 11)
Рис. 11. Принцип генерирования копии |
Рис. 12 |
одинакового вида кода КА в ПИ |
|
Псевдодальность Dпсд (см. рис. 12) может быть представлена в следующей формуле:
Dпсд=Di+C∆T3I+C(∆TP-∆TCI), I=L,.....4
где Di - истинное расстояние объект - ИСЗ; с - скорость распространения радиоволн;
∆TCI - рассогласование бортовой шкалы времени і-го ИСЗ относительно шкалы времени системы «Навстар»;
∆TP - рассогласование шкалы времени аппаратуры потребителя относительно шкалы времени системы «Навстар»;
∆T3I - временные задержки, вызванные особенностью распространения радиоволн в ионосфере и тропосфере.
43
Название «псевдодальность» измеряемый параметр получил вследствие того, что он содержит погрешность, вызванную недостаточно точной синхронизацией эталона времени пользователя с единым временным GPS.
При использовании в аппаратуре потребителя высокостабильного генератора, синхронизированного по сигналам ИСЗ, для целей определения координат объекта в пространстве достаточно выполнить измерения относительно трех ИСЗ. В этом случае координаты потребителя определяются как точка пересечения трех сфероидов, центры которых совпадают с координатами ИСЗ на момент проведения измерений. При отсутствии синхронизации опорных генераторов, измерения выполняются относительно четырех ИСЗ, при этом решение навигационной задачи сводится к решению четырех уравнений с четырьмя неизвестными. В результате решения определяются трёхмерные координаты потребителя и поправка временной шкалы. Для объектов, расположенных на поверхности Земли, достаточно выполнить измерения относительно трех ИСЗ (двухмерная навигация), именно этот случай наиболее интересен в приложении к судовождению морских транспортных судов. Измеренные значения навигационных параметров, а также параметры орбит ИСЗ, переданные в составе навигационного сообщения, являются исходными для решения задачи определения координат объекта. Для определения скорости объекта используются значения доплеровского сдвига частоты принятых с ИСЗ сигналов.
Для удобства обслуживания АП имеется панель для ручного ввода данных и управления АП, а также визуальной индикации вводимых, контролируемых, измеряемых и определяемых данных.
ТОЧНОСТНЫЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ GPS
Известно, что существующая система GPS постоянно совершенствуется, в частности – в отношении сервиса, предоставляемого системой GPS сообществу ее пользователей, как гражданских, так и военных [8].
До мая 2000 года точность определения координат гражданских пользователей с использованием С/А кода была относительно низкой – 40-100 метров, так как этот код сознательно загрублялся так называемым режимом избирательного доступа SA (Selective Availability).
Это специально созданный режим работы КА системы GPS только для режима SPS С/А кода для всех гражданских потребителей, когда значительно ухудшается точность измерения навигационного параметра псевдодальности в системе L1 на частоте f1 =1575,42 МГц. В этом режиме фактически смещалась шкала времени подачи сигнала с КА.
Это преднамеренное ухудшение точности работы было задумано с целью "не дать возможному противнику воспользоваться точностью GPS с тактическими целями" (инициатива руководства ВС США). Позже, в процессе модернизации системы произошли изменения, когда в полночь на 1 мая 2000 года согласно директиве Президента Клинтона этот режим был отключен.
С тех пор, как режим избирательного доступа был отключен, пользователи GPS постоянно получают горизонтальную точность в SPS лучше
44

10 метров.
Без всяких дополнительных пользовательских затрат на оборудование, отключение режима избирательного доступа дало пользователям GPS во всем мире значительные преимущества в реализации широкого круга их задач.
Точностные характеристики определения места, скорости движения и времени подвижного объекта с помощью GPS (работающего не в дифференциальном режиме) определяются источниками погрешностей и соответствующими статистическими характеристиками.
В табл. 3. согласно [1], приведены СКО основных источников ошибок определения псевдодальности. при типичном геометрическом факторе HDOP, равном 2.
Таблица 3. СКО основных ошибок определения псевдодальности, м
Источники ошибок |
С/А-код |
Р-код |
Ионосфера |
7 |
0.01 |
Тропосфера |
0,7 |
0,7 |
Многолучевость |
1,2 |
1,8 |
Шумы приемника |
1,5 |
0,6 |
Погрешности координатно-временного обеспечения НКА |
3,6 |
3,6 |
Общая |
8,1 |
4,1 |
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1.Ю.А.Соловьев. Системы спутниковой навигации.- М.:Эко -Тренз, 2000.- 269 с.
2.Gregory T. French. Understanding the GPS. An introduction to the Global Positioning System. First Edition. 1996.- 255 p.
3.El-Rabbany, Ahmed. Introduction to GPS: the global positioning system. ARTECH HOUSE, INC. 2002.- 176 p.
4.Admiralty List of Radio Signals. Vol.2, 2005/2006, p.266.
5.Богданов В.А., Сорочинский В.А., Якшевич Е.В. Спутниковые системы морской навигации. – М.: Транспорт, 1987.- 200 с.
6.Радиотехнические системы: Учебник для вузов по спец. «Радиотехника» / Ю.П.Гришин, В.П.Ипатов, Ю.М.Казаринов и др.; Под. ред. Ю.М.Казаринова.- М.: Высш.шк., 1990.- 496 с.
7.Навигационное использование средневысотных спутниковых РНС на судах морского флота. Д.Н. Рубинштейн, С.С.Спаский. Мортехинформреклама. Морской транспорт. Серия «Судовождение, связь и безопасность мореплавания». Экспресс-информация, вып.1(368)-2(369), 2000, 60 с.
8.Б.К.Леонтьев. GPS: Все, что Вы хотели знать, но боялись спросить. М.: «Бук-Пресс», 2006.-352 с.
45