Материал: Прищепа И.Н., Ефременко И.И. Нейрофизиология
Управление в живых системах может осуществляться
за счет регуляции, инициации и координации.
Регуляция – это управление деятельностью органа (системы), который работает в автономном режиме, т.е. обладает свойством автоматии. Регуляция может проявляться в двух ва-
риантах: ослаблении или активации деятельности органа. Инициация – это процесс управления, при котором проис-
ходит запуск деятельности органа, не обладающего свойством автоматии. Например, инициируется деятельность скелетных мышц, в результате совершаются перемещения тела в пространстве, перемещение отдельных частей тела, формируется
рабочая поза.
Координация – это вид управления, при котором согласуется деятельность нескольких органов или систем одновременно и такое управление также направлено на получение положительного результата. Функциональные системы – это пример координации. Так, благодаря координации деятельности сердца, сосудов и других органов и систем организма артериальное давление в начале большого круга кровообращения поддерживается в условиях покоя на постоянном уровне.
Ворганизме существует ряд структур, которые участвуют
впроцессах управления, в том числе:
•клетки, продуцирующие биологически активные вещества и гормоны;
•центральная нервная система;
•структуры, находящиеся в органах и системах, деятельность которых подвергается управлению (периферические рефлекторные дуги, гладкие мышцы, ионные каналы).
Виды управления деятельностью органов
Управление происходит с участием трех основных меха-
низмов – местных, гуморальных и нервных.
Местные механизмы регуляции осуществляются тремя способами. Во-первых, за счет местных рефлекторных дуг. В составе этих дуг содержится весь набор нейронов, характерных для классической рефлекторной дуги (афферентные, вставочные и эфферентные). В связи с этим совокупность внутриорганных нейронов и их отростков А.Д. Ноздрачев предложил выделить в метасимпатический отдел вегетативной нервной системы.
111
Во-вторых, местные механизмы регуляции реализуются с участием гуморальных факторов, образующихся непосредственно в самом органе. Например, при интенсивной работе скелетных мышц в них могут накапливаться метаболиты, меняющие чувствительность гладких мышц сосудов к норадреналину – медиатору симпатических волокон.
В-третьих, местные механизмы регуляции осуществляются за счет использования физических, физико-химических, биохимических и физиологических свойств объекта регулирования. Например, в мышцах имеется система регуляторных белков (тропонин и тропомиозин), позволяющая регулировать
состояние актина и миозина.
Гуморальные механизмы регуляции проявляются в том, что управление деятельностью органа или системы происходит с участием гормонов и биологически активных веществ, которые продуцируются вдали от управляемого органа. Выделяясь в общий кровоток, эти гуморальные факторы достигают всех органов, но оказывают свое влияние на деятельность только тех из них, которые имеют специфические клеточные рецепторы для восприятия конкретного гу-
морального фактора.
Нервные механизмы регуляции – наиболее совершенная форма управления деятельностью органов и систем, которая реализуется с участием ЦНС. Ее основу составляют нейроны, посылающие к управляемым органам нервные импульсы. Этот процесс осуществляется быстро и строго по адресу, что позволяет нервным механизмам управления занимать главенствующее место среди всех способов управления. В процессе эволюции нервной системы происходила дифференцировка нейронных объединений в процессах управления. Те нейроны, которые управляют деятельностью внутренних органов, составляют вегетативную нервную систему. Нейроны, предназначенные для управления деятельностью скелетных мышц, а также для обработки сенсорной информации, получили название соматической нервной системы. В этой системе отдельно выделяют двигательные системы, предназначенные для управления скелетными мышцами, и сенсорные, благодаря которым организм получает необходимую информацию для процессов управления. Часть нейронов ЦНС предназначена для решения собственно управленческих задач, тем самым координирует деятельность всех нейронных образований.
112
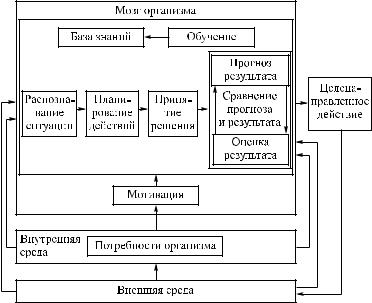
Рис. 13. Кибернетическая схема управления (по П.К. Анохину)
Вцелом, управление деятельностью внутренних органов
искелетными мышцами осуществляется по принципам, которые наиболее полно были сформулированы в рамках кибернетики (рис. 13). В свою очередь, эти принципы управления отражают характер рефлекторной деятельности ЦНС. Именно рефлекс как функциональная единица нервной системы составляет физиологическую сущность управления деятельностью внутренних органов и скелетных мышц.
Теория функциональных систем П.К. Анохина
Еще в 1930-е гг. ученик И.П. Павлова П.К. Анохин предло-
жил собственную концепцию для объяснения проблем управления в живых системах. Она получила название теории функциональных систем. В последующие годы теория была
развита и в настоящее время, по мнению ряда физиологов, является ведущей теорией, объясняющей принципы нервной ре-
113
гуляции деятельности внутренних органов и систем, деятельности скелетных мышц.
Теория функциональных систем предполагает, что в организме имеется управляющее устройство («центральная архитектура»), которое управляет многими органами или системами, входящими в данную функциональную систему
иработающими ради положительного приспособительного результата. Отсюда результат действия – это системообразующий фактор, т.е. именно результат организует систему. С точки зрения теории функциональных систем предполагают четыре варианта результатов:
•показатели внутренней среды организма, которые опре-
деляют нормальный метаболизм тканей (например, рН, рСО2, рО2, величина артериального давления и т.п.);
•результаты поведенческой деятельности, удовлетворяющие основные биологические потребности организма, в том числе потребность в пище, воде, продолжении рода;
•результаты стадной деятельности животных, удовлетворяющие потребности сообществ;
•результаты социальной деятельности человека, удовлетворяющие его социальные потребности.
По мнению П.К. Анохина, любая функциональная система состоит из пяти основных компонентов: 1) полезный приспособительный результат; 2) рецептор результата; 3) обратная афферентация, т.е. информация, идущая от рецептора в центр; 4) центральная архитектура (нервные центры); 5) исполнительные компоненты.
Функциональная система – это динамические образования: если результат получен, то система может быть ликвидирована. П.К. Анохин подробно рассмотрел возможные структуру
ихарактер функционирования управляющего устройства, или центральной архитектуры (рис. 14). Центральная архитектура включает в себя ряд логических блоков, решающих вполне определенную задачу, и в итоге вся функциональная система получает искомый полезный результат.
По П.К. Анохину, центральная архитектура имеет следую-
щую последовательность блоков.
Блок афферентного синтеза, который на основе приобретенного опыта и с учетом текущих потребностей «просеивает» всю поступающую в мозг информацию и отбирает из нее наиболее нужную для организма в данный момент времени.
114
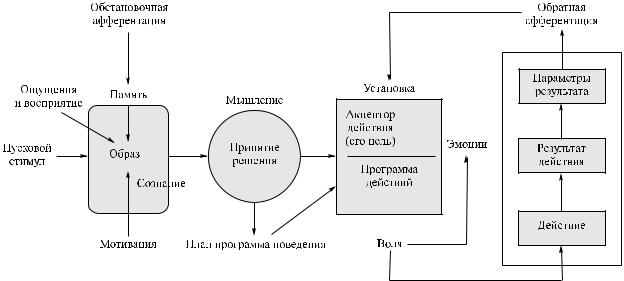
Рис. 14. Схема функциональной системы (по П.К. Анохину)
115