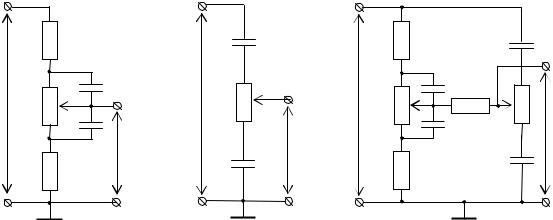
Схема, приведенная на рис. 9.9, б, предназначена для регулировки тембра в области верхних частот. Сравнительно маленькие емкости С1 и С2 представляют значительное сопротивление для токов низкочастотных и среднечастотных составляющих спектра сигнала. Поэтому на сопротивлении R1 выделяется напряжение, соответствующее верхней части частотной характеристики. Подъем движка вверх приводит к подъему частотной характеристики, а движение вниз – к спаду. Предел регулировки здесь определяется в первом приближении отношением емкостей С1 и С2.
На рис. 9.9, в оба регулятора объединены в реальную схему раздельной регулировки тембра, позволяющей получить подъем или спад частотной характеристики в области низких и высоких частот. Сопротивление R4 в этой схеме служит для развязки между регуляторами и обеспечивает независимость регулировки одного из них от положения движка другого. Для нормальной работы такого регулятора тембра желательно, чтобы на его входе был включен генератор ЭДС, а нагрузка имела по возможности большее сопротивление. Невыполнение этого условия приводит к чрезмерному уменьшению сопротивлений и увеличению емкостей.
9.3.3.Активные регуляторы тембра
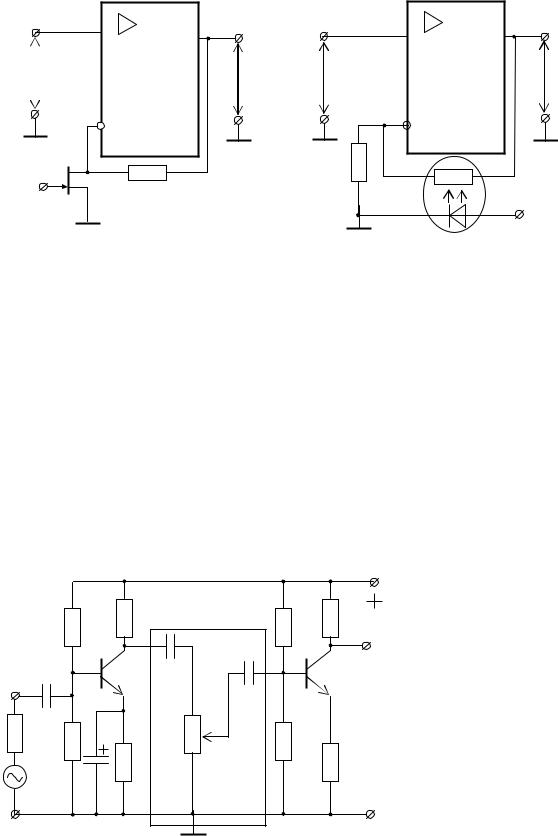
В активном регуляторе тембра можно использовать ОУ или любой другой усилитель с обратной связью [19], в цепи обратной связи которого включен регулятор (см. рис. 9.9, в). Такой регулятор тембра представлен на рис. 9.10. На этом рисунке сопротивления R1, R2, R3 и конденсаторы C2, C3 образуют регулятор тембра в области низких частот. Цепочка C4, R5,C5 позволяет регулировать частотную характеристику в области высоких частот. Сдвиг движков потенциометров вправо приводит к увеличению глубины частотно-зависимой обратной связи и сужению частотной характеристики. Сдвиг движков влево уменьшает обратную связь и способствует подъему и расширению частотной характеристики в области низких и высоких частот. Сопротивление R4 устраняет влияние одного регулятора на другой. Чтобы по переменным сопротивлениям не протекал постоянный ток и не создавал дополнительных помех, включены разделительные конденсаторы C1 и C6. Сопротивление R6 создает обратную связь по постоянному току, необходимую для задания рабочей точки и температурной стабилизации. Его величина выбирается в десятки раз большей, чем