Материал: Погорелов В.И.-Прочность и устойчивость тонкостенных конструкций
Используя выражение (1.52) и условие общей устойчивости оболочки (1.43) получим следующее нелинейное уравнение:
pp L |
|
δ |
4 |
|
5 2 |
|
12(1−μ2 ) pp R3 |
3 4 |
||
|
= |
|
|
1 |
+ |
|
|
|
, |
|
0,92E |
|
|
3Eδ3 |
|||||||
|
R |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
4 |
|
|
|
из которого определяется толщина оболочки.
Расстояние между шпангоутами определим из условия местной устойчивости (1.42) и формулы П.Ф. Папковича:
|
|
l = |
0,92E |
|
δ |
4 |
|
5 2 |
|
|
|
pp |
R |
|
. |
|
|||
|
|
|
|
R |
|
|
|
||
Тогда |
площадь |
шпангоута |
|
из |
условия |
устойчивости |
|||
Fi = (R3li |
3E)1 2 pp , |
высота и ширина полки b = |
Fi A , h = bA , |
||||||
а момент инерции сечения определяется из (1.50).
Из других сечений для шпангоутов используются зетобразные и тэобразные сечения. Если принять, что ширина этих сечений составляет 0,325 от ширины полки стенки, то расчет шпангоута останется без изменений за исключением того, что другим будет коэффициент k в формуле (1.50), связывающей момент инерции и площадь сечения. Теперь по известной толщине оболочки можно определить и потребную жесткость торцевого шпангоута, воспользовавшись (1.36).
2. ГОЛОВНОЙ ОТСЕК ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ
В конце активного участка траектории головной отсек получает угловые и линейные возмущения. Дальнейший полет его происходит в разреженных слоях атмосферы, поэтому эти возмущения не компенсируются аэродинамическим стабилизирующим моментом и на пассивном участке траектории неуправляемый отсек вращается вокруг центра тяжести, занимая произвольное положение относительно поверхности Земли. В то же время сам центр тяжести движется по расчетной траектории. Вход ГО в плотные слои атмосферы после пассивного участка происходит с произвольным углом атаки, в частности, он может быть равен и 180°, когда ГО
34
входит днищем вперед. В процессе дальнейшего полета наличие угла атаки у ГО и увеличение плотности атмосферы создают условия для возникновения стабилизирующего аэродинамического момента, который стремится уменьшить угол атаки.
Начальные возмущения компенсируются не сразу, а по прошествии некоторого времени, определяемого инерционными характеристиками ГО.
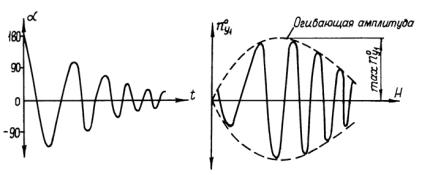
Зависимость изменения угла атаки от времени (рис. 14) носит колебательный характер, и у статически устойчивого ГО амплитуда колебаний стремится к нулю. Огибающая амплитуд колебаний поперечных перегрузок имеет максимум (рис. 15).
Это следует из формулы для перегрузок ny1 = cy1ρv2 Sm  2G0 ,
2G0 ,
из которой видно, что при уменьшении высоты плотность растет, а скорость уменьшается из-за силы лобового сопротивления.
Рис. 14. Угол атаки при входе |
Рис. 15. Огибающая амплитуд |
ГО отсека в атмосферу |
поперечных перегрузок |
Максимум огибающей |
амплитуд поперечных перегру- |
зок принимается в качестве второго основного расчетного случая для головного отсека, движущегося в атмосфере по баллистической траектории. Угол атаки в расчетном случае не равен нулю, поэтому на ГО действуют несимметричное давление и поперечные перегрузки. Кроме осевых внутренних усилий в корпусе возникают перерезывающие силы и изгибающие моменты.
35
2.1. Поперечные перегрузки при снижении в атмосфере
Задача о расчете неуправляемого движения ГО в атмосфере довольна сложна и подробно рассмотрена в [17, 35]. В расчетах на прочность обычно считают, что начальный угол атаки
α0 =180 , dα dt = 0 , т.е. ГО "зависает" над атмосферой. Высо-
dt = 0 , т.е. ГО "зависает" над атмосферой. Высо-
ты, на которых возникают максимальные осевые и поперечные перегрузки, различны. Аналитическое выражение для зависимости угла атаки от высоты [17] позволяет определить поперечные перегрузки центра тяжести ГО.
При получении этой зависимости предполагалось, что движение ГО происходит по прямой, причем коэффициенты аэродинамических сил и момента остаются постоянными во все время движения вплоть до встречи его с поверхностью Земли. Дифференциальное уравнение, описывающее процесс колебаний ГО вокруг центра тяжести, имеет вид
|
|
|
|
|
d 2α |
+ 2k e−y |
dα |
+ (k |
2 |
e−y |
+ k e−2 y )α = 0 |
|
, |
|
|
(2.1) |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
dy2 |
|
|
1 |
|
dy |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где |
y = β H |
– |
|
безразмерная |
|
|
|
|
|
|
|
|
|
высота |
|
|
|
полета; |
||||||||||||||||
k = |
δ0 |
c |
x |
−cα |
+ |
(m |
+mα) |
ml2 |
; |
δ |
0 |
=ρ |
S |
m |
(2β mSinϑ )−1 |
= k |
0 |
/ 2c |
x |
; |
||||||||||||||
|
||||||||||||||||||||||||||||||||||
1 |
2 |
|
|
y |
|
|
д |
z |
|
|
|
|
|
|
|
|
з |
|
|
|
a |
|
|
|
|
|
||||||||
|
|
1 |
1 |
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||||
cαy |
= ∂cy |
|
∂α ; |
|
|
mд = ∂mд |
∂(ωl v) |
– |
коэффициент демпфирую- |
|||||||||||||||||||||||||
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
∂mz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
щего момента по тангажу; |
mzα = |
, |
|
m – масса ГО; |
|
l – харак- |
||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
терная длина; I – массовый момент инерции по тангажу; |
|
|
|
|
|
|||||||||||||||||||||||||||||
k2 = δ0 |
[cαy |
− mzα (ml 2 |
I )(βlSinϑa )−1 ]; |
k3 |
= −δ02cαy |
[cx |
+ mд (ml 2 |
I )]. |
|
|
||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
Точное решение уравнения (2.1) имеет вид |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
α( y) = α0 F1(a,1, z)exp[(k1 |
z0 )−1 2]z , |
|
|
|
(2.2) |
|
|||||||||||||||||||||
где |
z( y) = 2(k2 |
|
−k )1 2 e−y = z |
e−y |
; |
|
a =1 2 −(k |
+ k |
2 |
)z−1 |
; |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
1 |
3 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
0 |
|
|
|
|
|
|||||
F1(a,1, z) =1 + az + a(a +1)(2!)−2 z2 + ... – конфлюентная гипер-
геометрическая функция.
Для ГО, у которых a >10, решение (2.2) существенно упрощается и принимает вид
α( y) = α0 J0 {[(2 −4a)z]1 2 }exp(k1z / z0 ) ,
2 }exp(k1z / z0 ) ,
36

где J0 – функция Бесселя первого рода и нулевого порядка. Так как подъемная сила Y = cαy1 α qSm , то выражение для
поперечных перегрузок запишется так:
ny1 ( y) = (cαy1α( y)qSm ) mg .
mg .
Для определения зависимости скоростного напора q от высоты можно воспользоваться формулой (1.5) для скорости и принять такой же закон изменения плотности от высоты, что и в подразд. 1.1.
Построив график зависимости перегрузок от высоты, найдем точку траектории, в которой перегрузки достигают максимума.
Величину максимальных поперечных перегрузок можно оценить также по формуле
max ny1 = (cy1 max  cx1 ) max nx1 ,
cx1 ) max nx1 ,
где cy1max – максимально возможное значение коэффициента подъемной силы ГО заданной геометрической формы; cx1 –
среднее значение коэффициента силы лобового сопротивления на участке траектории от точки входа до max nx1 .
Для оценочных расчетов можно считать, что max ny1 достигается на той же высоте, что и max nx1 .
2.2.Внутренние усилия в отсеке с грузами
Вэтом расчетном случае угол атаки не равен нулю, поэтому давление, действующее на корпус головного отсека, несимметрично. Рассмотрим цилиндроконический ГО, а для определения среднего давления на каждом из участков, определим сначала создаваемые ими подъемные силы. Так как максимальные попе-
речные перегрузки известны, то полная подъемная сила отсека Y = ny1mg . Распределим ее по участкам пропорционально коэф-
фициентам подъемной силы [23]. В качестве первого участка примем конус с затуплением, для которого cαyi = 3 . На втором –
цилиндрическом участке cαy =1.5(li di )α , а на третьем – усе- |
|
i |
|
ченном конусе – cαy = 3(1−(di2−1 |
di2 )) , где di−1 – диаметр левого, |
i |
|
меньшего основания конуса, a di |
– большего. |
37

В качестве характерной площади для цилиндра и конуса с затупленем принимаем Si = πdi2  4 , а для усеченного конуса
4 , а для усеченного конуса
Si = π(di2 −di2−1 ) 4 . Определим сначала координаты центров давления, отсчитываемые от вершины головного отсека. Имеем xдi = xi−1 +λдli , где xi-1 – расстояние от вершины отсека до лево-
4 . Определим сначала координаты центров давления, отсчитываемые от вершины головного отсека. Имеем xдi = xi−1 +λдli , где xi-1 – расстояние от вершины отсека до лево-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
го сечения участка, li |
– его длина, а λд = |
2 − d |
(1 + d ) |
|
|
|
di−1 |
. |
||||||
, d |
= |
|||||||||||||
|
|
|
|
2 ) |
|
|||||||||
|
|
3(1 − d |
|
|
|
di |
||||||||
3
Координата центра давления всего отсека: xд = ∑Yi xдi y ,
i=1
cα S
где подъемные силы участков Yi =Y yi i , а производная коэф- cαy Sm
α |
3 |
α |
S |
i |
|
фициента подъемной силы всего отсека cy |
= ∑cyi |
|
. |
||
|
|
||||
|
i=1 |
|
Sm |
||
Погонную аэродинамическую нагрузку участков определяем по формулам:
а) конус с затуплением: αqSi |
|
∂cαyi |
= 6 |
ξ |
|
; |
|
|
|
|
||||||||||
|
|
∂x |
li2 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
б) цилиндр: αqSi |
∂cαyi |
= 0,75 |
|
α |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
||
∂x |
di |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
в) усеченный конус: αqSi |
∂cαyi |
|
|
|
|
6(d |
i |
−d |
i |
−1 |
)2 |
|
d |
i−1 |
||||||
|
|
= |
|
|
|
|
|
li |
|
|||||||||||
∂x |
|
|
|
li2di2 |
|
|
(di −di−1) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
+ξ .
В приведенных выражениях координата ξ отсчитывается от левой границы соответствующего участка.
Для определения максимального аэродинамического давления, действующего на участок, представим его в виде симметричной и несимметричной составляющих (рис. 16,а):
p(ϕ) = pα=0 + pa , |
pα=0 – аэродинамическое давление при ну- |
левом угле атаки; |
pa – приращение аэродинамического давле- |
ния из-за угла атаки, которое аппроксимируем следующей зависимостью: pa = pmCosψ = − pm sinϕ ; pm – максимальное
38