Материал: Погорелов В.И.-Прочность и устойчивость тонкостенных конструкций
Из выражения (1.8) следует, что максимальные осевые перегрузки не зависят от формы и массы головного отсека.
Для расчета скорости и угла наклона скорости к плоскости горизонта в конце активного участка в зависимости от дальности полета ракеты можно воспользоваться следующими зависимостями:
vа =v1 2 |
Sin(L / 2RЗ) |
; ϑа = |
π |
− |
L |
, |
(1.9) |
1+Sin(L / 2R ) |
4 |
4R |
|||||
|
З |
|
|
|
З |
|
|
где L эллиптическая дальность в км; RЗ = 6340 км – радиус Земли; v1 = 7800 м/ с – первая космическая скорость.
1.2. Осевые перегрузки при движении в жидкости
При встрече движущегося тела с водной поверхностью на него действуют гидродинамические силы, которые по мере продвижения тела внутри жидкости сначала возрастают, а затем уменьшаются, проходя через точку максимума. Максимум имеют и перегрузки, представляющие собой отношение всех внешних сил, кроме массовых, к весу.
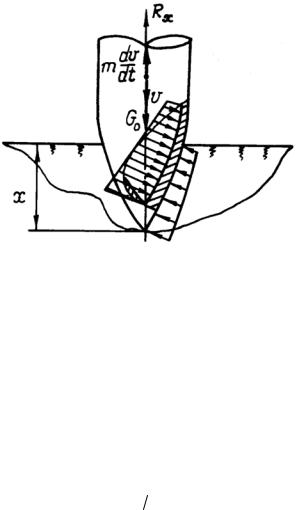
Рассмотрим прямолинейное движение ГО перпендикулярно водной поверхности от момента их контакта (рис. 2).
Рис. 2. Движение ГО перпендикулярно водной поверхности
9
Уравнение движения тела имеет вид |
|
|||
m |
dv |
= mg − A − Rx , |
(1.10) |
|
dt |
||||
|
|
|
||
где m, v – масса и скорость аппарата; А – Архимедова сила; Rx –
гидродинамическая реакция жидкости на движущееся тело – зависит от координаты, времени и определяется распределением давления по смоченной поверхности аппарата. Расчет Rx вызы-
вает определенные трудности, связанные с решением гидродинамической задачи о нестационарном обтекании тела заданной формы.
Для оценки перегрузок, действующих на ГО в этом случае, воспользуемся широко используемым в гидродинамике понятием присоединенной массы, которое было предложено Г. Кирхгофом в 1878 г.
Все поверхностные силы, к которым относится и гидродинамическая реакция, разделяются на инерционные и силы неинерционного происхождения, такие как силы трения и волновые.
Для учета инерционных свойств жидкости вводится понятие присоединенной массы, которая добавляется к массе самого тела. Присоединенной массой называют такую фиктивную массу, кинетическая энергия которой при ее движении со скоростью тела равна кинетической энергии окружающей тело жидкости.
Если w – скорость жидкости, вызванная движением тела, то ее кинетическая энергия
T = ∫ρ |
w2 |
dτ , |
(1.11) |
|
2 |
||||
τ |
|
|
где ρ – плотность жидкости; τ – объем возмущенной части жидкости.
Умножая и деля на квадрат скорости тела, перепишем выражение (1.11) следующим образом:
T = |
v 2 |
|
w |
2 |
λv |
2 |
|
2 |
∫ρ |
|
dτ = |
2 |
, |
||
|
τ |
v |
|
|
|||
где λ = ∫ρ w dτ – присоединенная масса жидкости.
τ v
Для тела сферической формы в [37] приводится следующая формула:
10
λ = 4 3ρ x3 2 (2R − x)3 2 ,
3ρ x3 2 (2R − x)3 2 ,
где R – радиус сферы.
Предположим, что весом тела, Архимедовой силой и силами неинерционного происхождения, действующими на него со стороны жидкости, можно пренебречь. Принимая тогда в качестве замкнутой механической системы тело и окружающую его возмущенную жидкость, воспользуемся вместо ( 1.10) законом сохранения количества движения, который в данном случае можно записать так:
mv0 = (m + λ)v , |
(1.12) |
где v0 – скорость ГО в момент касания с водной поверхностью.
Для определения координаты х (рис. 2) имеем обыкновенное дифференциальное уравнение [1], следующее из (1.12):
dx |
= |
mv0 |
, |
(1.13) |
|
dt |
(m + λ) |
||||
|
|
|
в котором присоединенная масса зависит от x .
Если ограничиться случаем малых погружений аппарата, когда x << R, уравнение (1.13) принимает вид
dx |
= |
mv0 |
= |
|
|
3mv0 |
|
.(1.14) |
|
dt |
(m + 4 3ρR3 2 x3 2 2 2) |
|
3m |
|
x 3 2 |
2 2 |
|||
|
|
|
|
4ρR3 |
|
3 |
+ |
|
|
|
|
|
|
|
4ρR |
R |
|
|
|
|
|
|
|
|
|
|
|
||
Для определения перегрузок найдем сначала ускорение движущегося аппарата, продифференцировав (1.14):
d |
2 |
x |
|
27 2 |
|
|
|
2 |
|
|
x |
|
1 |
|
|
|
|
|
|
|
|
x R |
|
|
|
|
|
|
|||||||
|
|
= − |
mv0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||||||||||||
dt |
2 |
|
|
16 |
|
ρR |
3 |
|
|
|
R |
R |
|
|
m |
|
|
x |
|
3 2 |
3 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 4 |
|
ρR |
3 |
+ 2 2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда осевые перегрузки равны: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
d |
2 |
x dt |
2 |
|
27 |
|
|
|
|
|
|
2 |
|
x |
|
1 |
|
|
|
|
|
|
|
x R |
|
|
|
.(1.15) |
||||||
nx1 = − |
|
|
= |
|
2 mv0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
g |
|
16 |
|
|
|
3 |
|
|
|
R |
R |
|
|
m |
|
|
x 3 2 |
3 |
|
|
|
||||||||||
|
|
|
|
|
|
|
ρR |
|
|
|
|
|
|
|
|
|
+ 2 2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 4 |
ρR |
3 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Найдем точку экстремума перегрузок, продифференцировав (1.15) по x/R и приравняв результат к нулю. После преобразова-
11
ний получим следующее выражение для определения координаты с максимальными перегрузками:
|
x |
|
3m |
|
2 3 |
(1.16) |
|
|
= |
28 2ρR3 |
|
. |
|
|
R m |
|
|
|
||
Подставляя (1.16) в (1.15), находим максимальные осевые перегрузки:
max nx1 = −3,22 (ρR3 / m)2 3 v02 /[gR] .
3 v02 /[gR] .
Можно определить также среднее давление, действующее на смоченную поверхность аппарата на этой глубине, если принять,
что гидродинамическая сила Rx = pm F , где F = π r2 – проекция смоченной поверхности сферы на направление, перпендикулярное оси симметрии; r =  2Rx – радиус проекции.
2Rx – радиус проекции.
С учетом принятых допущений из уравнения движения (1.10) получаем выражение для определения среднего давления в точке экстремума перегрузок:
pm = − m(d 2 xFdt 2 )m .
После подстановки ускорения с учетом (1.16) и преобразований получим
|
2mv 2 |
|
ρR3 |
4 3 |
|
pm = |
|
0 |
|
|
|
R |
3 |
|
m |
. |
|
|
|
|
|
||
1.3. Максимальные осевые перегрузки при движении в грунте
Это основной расчетный случай для ГО неуправляемых ракет, так как во всех других случаях эксплуатации нагрузка значительно меньше [15]. На корпус ГО с заполнителем (рис. 3) действуют давление снаряжения на стенки, давление грунта, массовая нагрузка в металле (сжимающая). Уравнение движения головного отсека:
m(dv dt) = G0 − Rx .
dt) = G0 − Rx .
Определить силу сопротивления грунта Rx довольно сложно, так как необходимо знать распределение давления по поверхно-
12
сти головного отсека. Воспользуемся законом сохранения энергии, на основании которого вся кинетическая энергия тела, которой оно обладает в момент контакта с преградой, расходуется на работу по преодолению силы сопротивления среды. Тогда
mv02 / 2 = A , где v0 – скорость тела; m – его полная масса.
Рис. 3. Нагружение корпуса ГО при движении в грунте
Аппроксимируем силу сопротивления линейной зависимостью, считая, что она меняется от максимального значения до нуля на глубине проникания. Тогда работа равна:
|
|
|
|
|
|
|
|
|
A = 1 Rmaxlпр . |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dv |
|
|
|
|||
|
Из |
уравнения |
|
|
движения |
|
|
Rmax |
≈ m |
|
. |
Тогда |
||||||||||||||||||
|
|
|
dt |
|||||||||||||||||||||||||||
|
mv02 |
= |
1 m |
|
dv |
|
lпр , |
откуда |
|
|
dv |
|
|
|
= |
v02 |
, а максимальные |
|||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
2 |
|
2 |
|
dt |
|
max |
|
|
|
|
|
|
|
dt |
|
max |
|
|
lпр |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
перегрузки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
max nx |
|
= |
|
dv dt |
|
max |
= |
|
v02 |
. |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
g |
|
|
glпр |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
13