Материал: Погорелов В.И.-Прочность и устойчивость тонкостенных конструкций
8.10. Напряжения в обечайке у нормального шпангоута
Жесткость шпангоута значительно больше жесткости оболочки, поэтому здесь возникают изгибные напряжения, которые накладываются на безмоментные. Предполагая, что шпангоут абсолютно жесткий, найдем суммарные напряжения, которые возникают в цилиндрической обечайке бака в зоне краевого эффекта.
Для определения краевой перерезывающей силы Q0 и момента M0 (рис. 61) запишем следующие условия совместности перемещений и углов поворота цилиндра и шпангоута в плоскости их стыка:
|
|
|
|
|
|
|
|
|
|
Wp |
+WM |
0 |
+WQ |
|
= 0 ; |
|
|
|
|
|
|
|
|
(8.32) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
ϑp |
+ϑM |
0 |
|
+ϑQ |
= 0 ; |
|
|
|
|
|
|
|
|
(8.33) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
W |
p |
= |
|
1 |
( р |
p |
− |
|
μN1 |
) ; N |
1 |
|
= |
рp R |
+T ; W |
= − |
|
1 |
|
|
Q |
0 |
; |
|
||||||||||||||||||
4α4 D |
|
|
|
|
2α3D |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
Q0 |
|
|
|
|
|
|
||||||||||||
W |
|
= − |
1 |
|
M |
|
; ϑ |
|
|
= 0 , ϑ |
|
= |
|
|
1 |
Q |
|
; |
ϑ |
M 0 |
= |
|
1 |
|
|
M |
|
. |
||||||||||||||
M 0 |
|
|
2α2D |
|
0 |
|
|
p |
|
|
|
|
|
|
|
Q0 |
|
|
2α2 D |
|
0 |
|
|
|
|
αD |
|
|
|
0 |
|
|||||||||||
Из |
уравнения |
(8.33) |
|
|
получаем |
Q0 = −2αM 0 . Преобразуем |
||||||||||||||||||||||||||||||||||||
выражение для Wp, подставив в него D, α , N1: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Wр = |
|
ррR2 |
|
(1− |
μ |
|
− |
|
μT |
) . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Eδ |
|
|
|
2 |
|
|
ррR |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Тогда условие совместности перемещений (8.32) принимает вид
ррR2 |
(1− |
μ |
− |
μT |
) + M 0 |
(− |
1 |
) = 0 |
, |
|
Eδ |
2 |
ррR |
2α2 D |
|||||||
|
|
|
|
|
|
откуда
139
|
|
M 0 |
|
= − |
ррR2 |
(1− |
μ |
− |
μT |
|
)2α2 D . |
|
|
|
|
|
||||||||||||||||
|
|
|
|
Eδ |
|
|
2 |
ррR |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
После преобразований получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Q0 = |
рр |
(1− |
μ |
− |
|
μT |
) ; |
M 0 = − |
|
|
рр |
(1 |
− |
μ |
− |
μT |
) . |
|
||||||||||||||
α |
|
2 |
|
ррR |
2α2 |
2 |
ррR |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Используя выражения для напряжений |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
σ = |
|
|
N1 |
± |
6M1 |
|
, |
σ |
|
= |
N2 |
|
|
± μ |
6M1 |
, |
|
|
|
|
|||||||||||
|
|
|
|
|
|
δ |
|
|
|
δ2 |
|
|
|
|
||||||||||||||||||
|
|
1 |
|
|
|
δ |
|
|
|
|
δ2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
погонных усилий |
|
|
N1 = ( ррR) |
2 +T , N2 = (Eδ R)W +μN1 и пе- |
||||||||||||||||||||||||||||
ремещений |
W =W |
p |
+W , где |
|
W |
= − |
pp R2 |
(1− μ − |
μT |
)ϕ(αx) , |
||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
Eδ |
|
|
2 |
|
pp R |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
получаем следующие окончательные выражения для определения суммарных напряжений:
|
|
|
p p R |
|
2 3 |
|
μ |
μT |
|
|
|
|
|
|
σ1 = |
2δ |
[1 |
1−μ2 |
(1− |
2 |
− p p R )ψ(αx)], |
||||
|
p p R |
|
μ |
|
μT |
|
|
μ 3 |
|
μ |
μT |
|
σ2 = |
δ |
[1−(1 |
− 2 |
− p p R )ϕ(αx) |
1−μ2 (1 |
− |
2 |
− p p R )ψ(αx)] . |
||||
В записанных формулах верхний знак соответствует наружной поверхности цилиндра, а нижний – внутренней. На рис. 61 приведен характер эпюры напряжений σ1 и σ2 на наружной по-
верхности цилиндра, который получается в рассматриваемом случае. Наибольшую опасность с точки зрения прочности представляет точка цилиндра, в которой α x = 0 , где возникают наибольшие сжимающие напряжения.
9.МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ
ВМКЭ оболочечная конструкция осесимметричной формы разбивается на конечные элементы, соединенные между собой по узловым окружностям. Простейшим конечным элементом является усеченный конус, с помощью которого можно аппроксимировать любую сколь угодно сложную конфигурацию ветвящихся оболочек (рис. 62). Точки на меридиональном сечении обо-
140
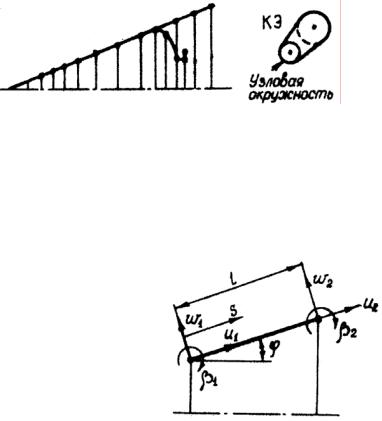
лочки соответствуют узловым окружностям, по которым стыкуются элементы. Угол наклона образующей элемента к оси симметрии может изменяться от 0 до 360°. Рассмотрим последовательные этапы формулировки задачи по методу конечных элементов.
Рис. 62. Разбиение конструкции на конические элементы
9.1. Аппроксимация перемещений в элементе
Рассмотрим конический элемент с заданными на узловых окружностях меридиональным ui , нормальным wi перемещениями
и угле поворота βi (рис. 63). Тогда перемещения и угол внутри
элемента можно аппроксимировать какими-нибудь простейшими функциями. Проще всего это сделать с помощью полиномов, порядок которых определяется требованиями к непрерывности производных от перемещений, которые используются при записи выражения для потенциальной энергии элемента. В рассматриваемом варианте конечного
элемента воспользуемся следующими полиномами:
u = a1 +a2s , w = a3 +a4s +a5s2 +a6s3 , β= dwds =a4 +2a5s +3a6s2 .(9.1)
Количество коэффициентов ai в точности соответствует ко-
личеству перемещений и углов в узлах элементов. Выразим через них коэффициенты. При s = 0
141

u1 = a1; |
w1 = a3; |
β1 = a4. |
(9.2) |
При s = l
u2 = a1 + a2l; w2 = a3 + a4l + a5l 2 + a6l3 ; β2 = a4 + 2a5l +3a6l 2 .(9.3)
Решая систему линейных алгебраических уравнений (9.2) и (9.3), получаем
a1 = u1;a2 = 1l (u2 −u1);a3 = w1;a4 = β1;
a |
5 |
= |
1 |
[3(w − w ) − 2β l −β |
2 |
l]; a |
6 |
= |
1 |
[lβ |
2 |
− 2(w − w ) +β l]. |
||||
|
|
|||||||||||||||
|
|
l 2 |
2 |
1 |
1 |
|
|
l3 |
2 |
1 |
1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Подставляя полученные выражения для коэффициентов в |
|||||||||||||||
(9.1), получаем |
u = u2η+ (1−η)u1 |
; |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
(9.4) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w = w1N1(η) +β1lN2 (η) + w2 N3 (η) +β2lN4 (η) ,
где
η = s l ; N1(η)=1−3η2 + 2η3 ; N2 (η)= η− 2η2 + η3; N3 (η)= 3η2 − 2η2 ; N4 (η)= −2η2 + η3 .
l ; N1(η)=1−3η2 + 2η3 ; N2 (η)= η− 2η2 + η3; N3 (η)= 3η2 − 2η2 ; N4 (η)= −2η2 + η3 .
Полиномы N1, N2 , N3, N4 называются полиномами Эрмита, а
в теории МКЭ – функциями формы. В матричном виде выражения (9.4) можно переписать так:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w1 |
|
|
|
|
|
|
|
||
|
f |
|
= |
|
u |
|
= |
|
1−η |
|
0 |
|
|
0 |
|
|
|
η |
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
β1 |
, |
|
|
(9.5) |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
w |
|
|
|
|
0 |
|
|
|
|
N1 |
|
lN2 |
|
|
|
0 |
|
N3 |
|
lN4 |
|
u2 |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β2 |
|
|
|
|
|
|
|
||
где столбец узловых перемещений элемента |
|
|
|
d |
|
= |
|
u w β u w β |
|
|
T |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
2 |
2 |
2 |
|
. |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
9.2. Аппроксимация деформаций
Геометрические уравнения теории тонких оболочек для конической оболочки имеют вид [24]:
ε10 = du0  ds ; ε02 = (u0 sin ϕ+ w0 cosϕ)
ds ; ε02 = (u0 sin ϕ+ w0 cosϕ) r ;
r ;
142
|
d 2w |
|
|
|
sin ϕ dw |
||||
χ = − |
0 |
; |
χ |
2 |
= − |
|
|
0 |
, |
|
|
|
|||||||
1 |
ds2 |
|
|
r |
|
ds |
|||
|
|
|
|
|
|||||
где индексом «ноль» обозначены величины, относящиеся к срединной поверхности. Подставляя в них выражения (9.4), получаем
ε10 = dduη ddsη = 1l (u2 −u1),
ε02 = 1r {[ηu2 +(1−η)u1]sinϕ+[w1N1 +β1lN2 +w2 N3
|
|
|
1 |
|
|
d |
2 |
N1 |
|
|
|
d |
2 |
N2 |
|
|
|
d |
2 |
N3 |
|||
χ = − |
w |
|
|
+β l |
|
+ w |
|
|
|||||||||||||||
l 2 |
dη2 |
|
dη2 |
2 dη2 |
|||||||||||||||||||
1 |
|
|
|
1 |
|
|
1 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
χ |
2 |
= − sin ϕ w |
dN1 |
+β l |
dN2 |
+ w |
dN3 |
|
|||||||||||||||
|
|
|
|||||||||||||||||||||
|
|
|
|
rl |
|
|
1 |
|
dη |
|
1 |
|
dη |
|
2 |
dη |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где соответствующие производные равны:
+β2lN4 ]cosϕ}, (9.6)
+β2l d 2 N4 ,
dη2
+β2l dN1 , dη
|
dN1 |
|
|
|
= −6η+ 6η2 ; |
|
|
|
|
|
|
d 2 N1 |
|
|
= −6 +12η; |
|
|
|||||||||||||||||||||
|
|
dη |
|
|
|
|
|
dη2 |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
dN2 |
|
=1− 4η+3η2 ; |
|
|
|
|
|
|
|
d 2 N2 |
|
= −4 + 6η; |
|
|
|||||||||||||||||||||||
|
|
dη |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dη2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(9.7) |
|||||||
|
dN3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 2 N3 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
= 6η−6η2 ; |
|
|
|
|
|
|
|
|
= 6 −12η; |
|
|
|||||||||||||||||||||||||
|
|
dη |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dη2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
dN4 |
|
= −4η+3η2 ; |
|
|
|
|
|
|
|
|
d 2 N4 |
|
= −4 + 6η. |
|
|
|||||||||||||||||||||
|
|
dη |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dη2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Вводя в столбец деформаций |
|
ε |
|
= |
|
|
ε0ε0χ χ |
2 |
|
T |
, а также столбец |
|||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
узловых перемещений элемента |
|
d |
|
= |
|
u w β u w β |
|
|
T |
, |
геометри- |
|||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
2 |
2 |
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
ческие уравнения (9.6) с учетом (9.7) можно переписать в матричном виде:
|
ε |
|
= [B] |
|
d |
|
, |
(9.8) |
|
|
|
|
где прямоугольная матрица
143