Материал: Основы проектирования РН Куренков
кается рассматривать её движение относительно неподвижной Земли. Учет влияния вращения Земли и географических координат старта производится на последующих этапах проектирования. Поскольку силы и моменты, вызывающие боковое движение ракеты, малы, то ими можно пренебречь и считать движение ракеты на активном участке плоским. Влиянием вращательного движения ракеты на поступательное движение центра масс также можно пренебречь.
На рис. 2.8 представлена система сил, действующих на ракету на активном участке траектории (A0 - центр земного шара).
Рис. 2.8. Система сил, действующих на ракету на активном участке траектории
51
Для приближенного решения используются упрощенные системы уравнений движения, получаемые при следующих допущениях:
-ускорение силы тяжести в диапазоне высот активного участка траектории может считаться постоянным по абсолютной величине, но направленным к центру Земли;
-углы атаки малы и поэтому:
sin ; |
cos 1; |
X V , h, X V , h ; |
- программа движения ракеты на активном участке траектории задана в виде зависимости пр t , где - угол наклона вектора
скорости к горизонту старта (см. рис. 2.8).
Тогда система уравнений движения ракеты в проекциях на оси скоростной системы координат примет вид [11, 57]:
m t |
|
dV |
|
P h X V , h m t g0 sin |
; |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
dt |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
m t |
V |
d |
P h Y |
2 |
V , h m t g |
|
|
V 2 |
|
|
|||||||||
|
|
|
|
1 |
|
|
cos ; |
|
|||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
0 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
g0 R h |
(2.24) |
|||||
|
|
dh |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V sin ; |
|
|
|
|
|
|
|
|
||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
||||||||
|
d |
|
|
|
|
|
V |
|
cos ; |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
dt |
|
R h |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пр (t) , |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где m t |
- текущее значение массы ракеты; |
|
|
|
|
|
|||||||||||||
P h - суммарная тяга двигателей, направленная |
по продольной |
||||||||||||||||||
оси ракеты; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
X , Y - |
|
соответственно сила лобового сопротивления и подъем- |
|||||||||||||||||
ная сила ракеты;
g - текущее значение ускорения силы притяжения Земли;
- угол тангажа, измеренный между продольной осью ракеты и горизонтом старта;
пр t - программное значение угла тангажа;- угол атаки;
h - высота ракеты над поверхностью Земли;
52
- полярный угол;
R 6371км - средний радиус земного шара.
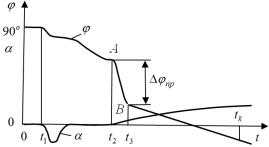
Примерный характер изменения угла тангажа и угла атаки в процессе полёта двухступенчатой РН показан на рис. 2.9.
Рис. 2.9. Характер изменения угла тангажа и угла атаки по времени полёта РН
Аэродинамические коэффициенты C x и C y , необходимые для
определения аэродинамических сил, зависят от формы и размеров корпуса ракеты. На ранних стадиях проектирования для ракетносителей с конической частью головного обтекателя, все ступени которых имеют одинаковый диаметр, могут использоваться следую-
щие зависимости для определения C |
x |
и |
C |
[11]: |
||
|
|
|
|
y |
|
|
|
0.29, |
0 M 0.8 |
|
|
||
|
M 0.51, |
|
|
|
|
(2.25) |
Сх |
0.8 M 1.068 |
|||||
0.091 0.5M 1 |
M 1.068 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
2.8 |
0 M 0.25 |
|
|
|
|
2.8 0.447 M 0.25 |
0, 25 M 1.1 |
|
||||
|
|
|
|
|
|
|
|
Cy |
|
|
0.660 |
M 1.1 |
1.1 M 1.6 |
|
(2.26) |
3.18 |
|
||||||
|
|
2.85 0.350 |
M 1.6 |
1.6 M 3.6 |
|
|
|
|
|
|
|
|
M 3.6 |
|
|
|
|
|
3.55 |
|
|
||
|
|
|
|
|
|
|
|
В этих выражениях М - число Маха.
53
С помощью интегрирования приведённых уравнений проверяется возможность реализации тактико-технических характеристик ра- кеты-носителя (высоты полета, вектора скорости в конце активного участка траектории и т.п.) при принятых проектных характеристиках ракеты (стартовой массе ракеты, количестве ступеней, компонентов топлива и их масс, масс составных частей ракетных блоков и т.д.).
Если заданные тактико-технические характеристики не достигаются, то производится коррекция проекта.
Контрольные вопросы
1.Расскажите о структуре многоступенчатой ракеты.
2.Приведите относительные характеристики масс составных частей ракеты.
3.Приведите функциональную связь между относительными характеристиками масс составных частей ракеты.
4.Какие характеристические скорости ракеты Вы знаете?
5.Что такое удельный импульс?
6.Как влияет атмосферное давление на тягу ракетного двигателя?
7.Составьте выражение для скорости ракеты с учетом реальных условий полета.
8.Приведите типовую приближенно-оптимальную программу изменения угла наклона траектории ракеты и поясните отдельные участки этой программы.
9.Для какой цели выполняются поверочные расчёты характеристик движения РН?
10.Приведите примерный график изменения угла атаки и угла тангажа по времени полёта РН.
54
3. ХАРАКТЕРИСТИКИ И ОСНОВНЫЕ ПРОЕКТНЫЕ ПАРАМЕТРЫ РАКЕТ-НОСИТЕЛЕЙ
3.1. Характеристики ракет-носителей
Характеристики ракет-носителей можно разделить на три группы:
-летно-технические;
-массогабаритные и энергетические;
-критериальные.
Косновным летно-техническим характеристикам ракет-
носителей относят:
- массу полезной нагрузки; - высоты орбит;
- точность выведения полезной нагрузки в заданную точку пространства по координатам, вектору скорости и времени;
- время для подготовки и осуществления запуска.
Кчастным летно-техническим характеристикам ракеты-
носителя относят:
- программу угла наклона траектории; - углы тангажа и углы атаки в процессе полета;
- скорость полета ракеты в произвольный момент времени; - значение массы ракеты-носителя в произвольный момент вре-
мени; - значения коэффициентов перегрузок.
Характеристики, связанные с динамикой полета ракеты-
носителя, называют также проектно-баллистическими парамет-
рами.
Летно-технические характеристики задаются в техническом задании на разработку ракетно-космического комплекса.
Косновным массогабаритным и энергетическим характери-
стикам ракет-носителей относят:
- стартовую массу ракеты и ее габариты;
55