Материал: Основы проектирования РН Куренков

1. Старт ракеты-носителя - вертикальный (по соображениям минимизации затрат массы конструкции корпуса ракеты на реализацию свойств прочности этого корпуса).
Продолжительность этого участка (0…tр) определяется достижением такой скорости ракеты, при которой возможен разворот ракеты с помощью аэродинамических сил (tр – время начала разворота). Из статистики такая скорость составляет V1 = 25…50 м/с. Угол атаки на этом участке до разворота ракеты должен быть равным нулю
t 0 .
2.Закон изменения угла наклона траектории t - непрерыв-
ный. Кроме того, непрерывными также должны быть угловые скорости t изменения этого угла. Причем угловые ускорения t ог-
раничены моментом сил, который могут создать рулевые органы ра- кеты-носителя.
3. При прохождении околозвукового диапазона скоростей (M = 0,8…1,2) угол атаки также равен нулю t 0 . Это ограниче-
ние связано с резким изменением производных от коэффициентов подъемной силы по углу атаки при прохождении через скорость звука и, следовательно, с резким изменением подъемной силы.
4. Сверхзвуковой диапазон скоростей в диапазоне чисел Маха M = 1,2…2,0, который соответствует прохождению ракетой максимального скоростного напора примерно на высотах 10..12 км, ракета
также должна проходить при углах атаки, близких к нулю t 0 .
Это ограничение также связано с ограничениями по несущей способности корпуса ракеты по прочности (иначе корпус ракеты необходимо делать более прочным и, следовательно, более тяжелым).
5. Отделение ракетных блоков (разделение ступеней ракеты) и сброс головного обтекателя, с целью обеспечения надежного (безударного) отделения, должны производиться при малых скоростных напорах. Практически это ограничение приводит к тому, что разделение первой и второй ступеней должно происходить на высоте не менее 50 км.
46

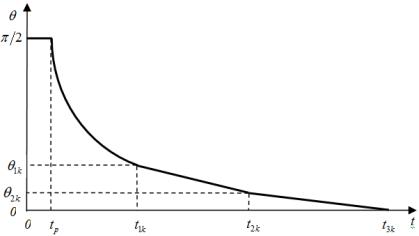
Описание типовой приближенно-оптимальной программы изменения угла наклона траектории первой ступени РН приведено ниже.
1. Вертикальный участок. На этом участке угол атаки равен нулю, а угол наклона траектории равен t 90 . Этот участок конча-
ется при достижении ракетой скорости V1 = 50 м/с (соответствующее время полета tр).
2. Участок начального и гравитационного разворота РН по плавной параболической кривой с учетом того, что в конце работы первой ступени угол наклона траектории должен быть равен некоторому значению, которое является оптимальным для начала работы второй ступени ракеты. Функция изменения программного угла наклона траектории на участке начального и гравитационного разворота ракеты
на интервале времени tp t |
t1к |
принимается следующей: |
|||||
t |
|
2 1k2 |
|
t1k |
t 2 |
1k , |
(2.20) |
|
t1k |
tp |
|
|
|
|
|
где 1k - значение угла наклона траектории в конце работы первой ступени;
t1k - время окончания работы первой ступени ракеты; t p - время начала разворота первой ступени ракеты;
t - текущее время полета первой ступени ракеты.
Замечаем, что при t t p угол наклона траектории равен 90 гра-
дусам, tp  2 , а при t t1k этот угол становится равным углу наклона траектории в конце полета первой ступени, t1k 1k .
2 , а при t t1k этот угол становится равным углу наклона траектории в конце полета первой ступени, t1k 1k .
График этой зависимости представлен на рис. 2.7 в пределах времени полета ракеты от t p до t1k .
Угол наклона траектории на участке полета второй ступени на интервале времени полета ракеты t1k t t2k , где t2k - время окончания полета второй ступени, изменяется по линейному закону от
1К |
до 2 К : |
|
|
|
|
|
|
t 1k |
|
1k |
2k |
t t1k , |
(2.21) |
|
t2k |
t1k |
||||
|
|
|
|
|
47
где 2k - значение угла наклона траектории в конце работы второй ступени;
t2k - время окончания полета второй ступени.
Рис. 2.7. График изменения программного угла наклона траектории для типовой приближенно-оптимальной траектории РН
Замечаем, что при t t1k угол наклона траектории равен конеч-
ному углу в конце работы первой ступени t1k 1k , а при t t2k этот угол становится равным углу наклона траектории в конце
полета второй ступени t2k 2k .
Для двухступенчатой ракеты конечный угол наклона траектории второй ступени, если вывод полезной нагрузки осуществляется на
круговую орбиту, должен быть равным нулю 2k 0 . Тогда из выражения (2.21), в частности, можно получить
t 1k |
t t1k |
|
|
|
t t1k |
|
|
|
1k |
1k 1 |
|
|
|
|
|
|
|
||||||
|
t2k t1k |
|
|
|
|
|
|
|
|
|
|
t2k t1k |
|
||
t |
2k |
t |
t t |
|
|
t |
2k |
t |
|
||
1k |
|
1k |
|
1k |
|
1k |
|
|
. |
||
|
|
t2k t1k |
|
|
|
|
|||||
|
|
|
|
t2k t1k |
|||||||
48
Программа изменения угла наклона траектории на участке полета третьей ступени на интервале времени полета ракеты
t2к t t3к , где t3k - время окончания полета третьей ступени, также должна соответствовать линейному закону от угла наклона траек-
тории в конце работы второй ступени 2k |
до угла наклона траектории |
|
в конце работы третьей ступени 3k : |
|
|
t 2k 2k |
3k t t2k . |
(2.22) |
t3k |
t2k |
|
В частности, для трехступенчатой ракеты, если вывод полезной нагрузки осуществляется на круговую орбиту, конечный угол накло-
на траектории должен быть равным нулю 3k 0 и формулу (2.22),
по аналогии со случаем с двухступенчатой ракетой, можно привести к следующему виду:
|
t3k t |
|
t 2k |
|
. |
t3k t2k
Следует также отметить, что в приведенной приближеннооптимальной программе изменения угла наклона траектории отсутствуют участки "выдерживания" перед разделением ступеней, так как они слабо влияют на результирующую скорость ракеты.
Параметры 1k и 2k считаются варьируемыми при решении оп-
тимизационной задачи по выбору программы угла наклона траектории. В первом приближении для двухступенчатой ракеты можно
брать |
|
25...400 |
, а для трехступенчатой ракеты |
|
1k |
|
|
|
|
2k |
0,15...0, 25 1k . |
(2.23) |
||
На последующих этапах проектирования ракеты-носителя оптимизируется уже не программа наклона траектории, а программа изменения угла тангажа с учетом изменения углов атаки при управлении ракетой.
Следует отметить, что в приведенных выше рассуждениях нигде не использовались стартовая масса ракеты или масса полезной нагрузки, так как оптимальная программа изменения угла наклона траектории нечувствительна к этим параметрам. В этой связи уместно
49
говорить о семействе подобных ракет-носителей, запускаемых по типовой приближенно-оптимальной траектории.
2.9. Уравнения движения РН для поверочных расчётов
Рассмотренная выше система уравнений движения РН (2.16) предназначена для выделения и анализа основных проектных характеристик. В уравнения этой системы входят углы наклона траектории, которые изменяются во времени. Наименьшие потери скорости РН будут тогда, когда ракета движется по оптимальной траектории.
Однако проблема состоит в том, что оптимальная траектория не всегда может быть реализована с конкретными характеристиками тяги двигателей и управляющих органов. При недостаточной силе тяги двигателей ракета вообще может не выйти на орбиту. Поэтому необходимы поверочные расчёты характеристик движения РН.
Для реализации оптимальной программы изменения угла наклона траектории в процессе вывода РН на заданную орбиту необходимо управлять ракетой. Управление РН, как правило, реализуется с помощью программы изменения угла тангажа (или изменения угла атаки) и циклограммы изменения силы тяги двигателей. Поэтому для поверочных расчётов в уравнения движения должны входить именно эти параметры.
Уравнения движения РН, которые учитывают достаточно полный набор основных факторов, влияющих на параметры движения РН, известны и представлены, например, в работах [11, 57]. Однако на начальных этапах проектирования многие конструктивные характеристики ракеты и двигателей либо вовсе неизвестны, либо известны весьма приближенно. Из-за отсутствия точных сведений о силах и моментах, действующих на ракету, о характеристиках автомата стабилизации, циклограммах работы двигателей и т.п. можно ограничиться точностью по скорости и высоте полета, характеризуемой ошибкой в 3—5% [11].
Чтобы обеспечить такую точность, используют упрощенные уравнения движения ракеты на активном участке, в которых отброшены или усреднены члены уравнений, мало влияющие на высоту и скорость полёта. На начальном этапе проектирования ракеты допус-
50