Материал: Основи вищої геодезії. Навчальний посібник. Літнарович
і змінюються систематично від пункту до пункту, В гірських районах 1
=0,1. Великі відхилення виска складають 10 і зенітні віддалі 92 - 95 . В гірських районах цю поправку враховують і в тріангуляції 2 класу.
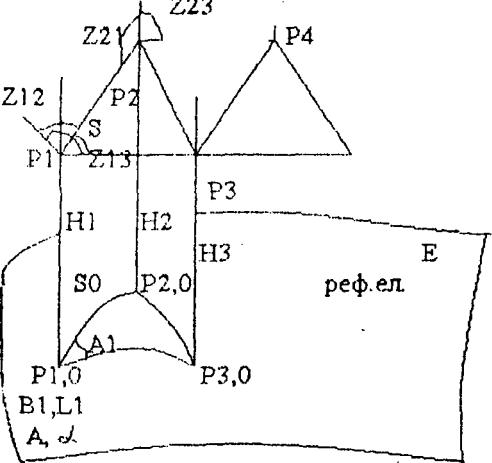
Припустимо, що в астрономічні азимути введені дві поправки: 2 – поправку на висоту спостерігає мого пункту над референц-еліпсоїдом і 3 – поправку на перехід від нормального перетину до геодезичної лінії.
Крім того, припустимо, що останній член формули (15.17) обчислений і його значення введено в астрономічний азимут.
Тоді, геодезичний азимут в лівій частині формули (15.17) буде являти собою геодезичний азимут геодезичної лінії на поверхні еліпсоїда, з’єднуючий проекції пунктів. Азимут геодезичної лінії .
Астрономічний азимут . Ні – геодезичні висоти. Після введення поправок2 і 3 отримаємо азимут геодезичний А. Рр1 паралельна вісі обертання Землі.
Рис 15.4.1 Геодезична лінія Р1Р2 на еліпсоїді
А = - (λ – L ) sin φ; (15.18)
Формула (15.18) називається рівнянням Лапласа. Геодезичний азимут, який розраховується за рівнянням Лапласа називається азимутом Лапласа. Для визначення азимута Лапласа на тріангуляційному пункті необхідно одержати з спостережень і λ. Широту φ можна не визначати, її можна замінити В в
(15.18).
Виконувались на кожних двох пунктах вихідні сторони базисної мережі або на кожних двох пунктах базисної сторони (тобто, в місцях перетинання рядів тріангуляції 1 класу).
111
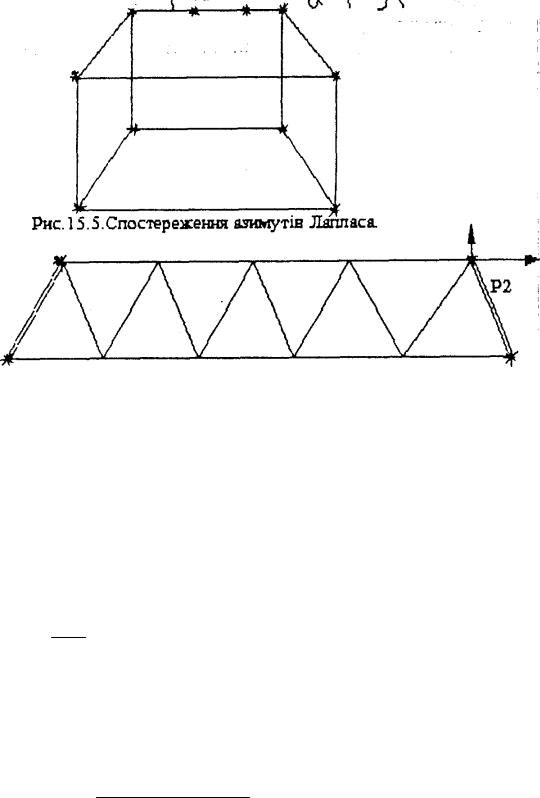
200-250 км Рис 15.6 Повздовжній і поперечний зсув
На деяких проміжних пунктах в ланці спостерігались λ і φ через 60 – 70 км. Середня квадратична похибка визначення пункту Лапласа:
mлапласа f m ;m ;m ;
Похибкою геодезичної довготи можна знехтувати.
Поздовжній і поперечний зсуви 1 класу складають порядку 0,6 м. Нехай, ряд розташований вздовж паралелі, тоді похибка геодезичної
довготи пункту Р2:
m 0.6sec 0.02 ; 30
А одна секунда дуги на еліпсоїді приблизно дорівнює 30 метрів. Астрономічні обчислення на пункті 1 класу виконують з точністю:
m ≤ 0,5 : m ≤ 0?45 : mλ – можно знехтувати Практично, похибка азимута Лапласа залежить від m і . m . Можна вважати, що:
ma 
 m2 m2 sin ; 15.19
m2 m2 sin ; 15.19
В середніх широтах m = 0,7 .
Астрономічні визначення азимута і довгот на різних пунктах між собою незалежні. Тому, азимути Лапласа можна розглядати як незалежні величини.
Властивість практичної незалежності Лапласовських азимутів від похибок геодезичних вимірів обумовило їх виключно важливу роль в розвитку тріангуляції. Одержані по рядам тріангуляції через визначену кількість
112
трикутників Лапласові азимути : 1)забезпечують виконання орієнтування всіх ланок і рядів тріангуляції з похибкою одного порядку; 2) не допускають поширення і накопичення систематичних похибок; 3) дозволяють вводити при врівноваженні азимутальні умовні рівняння, які підвищують точність всіх елементів тріангуляції; 4) дають можливість здійснювати надійний контроль кутових вимірів.
Лекція № 16. Редукційна проблема. 16.1. Постановка проблеми.
Рис 16.1 Редукування тріангуляції На поверхні Землі маємо ряд тріангуляційних пунктів Р1, Р2, Р3... На рис.
16.1 центри знаків з’єднані прямими в вершинах трикутників. Показані також напрямки прямовисної лінії (вертикальної осі кутомірного приладу). Ці напрямки фіксуються реально за допомогою рівня. При проектування на референц-еліпсоїді утворюється фігура поліедр. Якщо в вершинах його виміряти зенітні віддалі і горизонтальні кути, то поліедр був би однозначно визначеним.
Необхідно ввести систему координат і визначити координати пункту Р1, прийнявши його за вихідний, виконати астрономічні визначення і виконати орієнтування в геодезичній координатній системі. Визначивши В, L і Н всіх
113

тріангуляційних пунктів, ми б визначили напрямки прямовисних ліній. Але зенітні віддалі сильно спотворюються вертикальною рефракцією, а методів точного обчислення ще не існує. Геодезичні координати В, L і висоти Н почали визначати окремо.
Практично, проектують тріангуляційні пункти по нормалі на поверхню референц-еліпсоїда і їх з’єднують геодезичними лініями. Ці проекції на поверхні референц-еліпсоїда утворюють мережу сфероїдальних трикутників. Обчислення В, L виконують на поверхні прийнятого референц-еліпсоїда. Р1 і Р1,0 мають однакові координати. Необхідно вміти переходити від кута А на площині до кута А1 на еліпсоїді, від сторони S до SO. В зв’язку з роздільним визначенням В, L і Н виникає редукційна проблема.
Для визначення висоти Н використовують планові координати і проводять геометричне нівелювання, вимірюють силу тяжіння і застосовують метод астрономо-гравіметричного нівелювання.
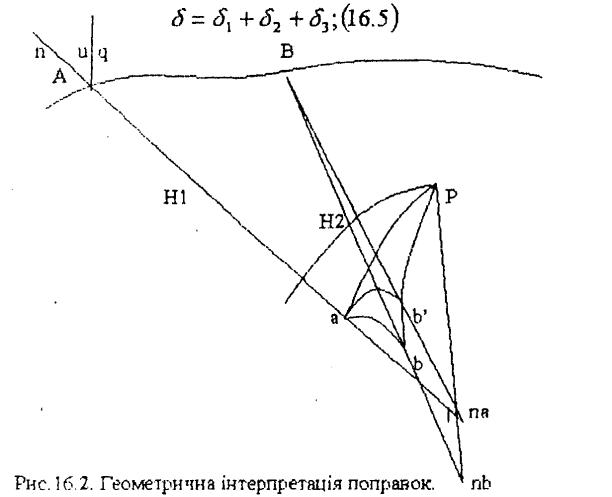
16.2. Редукування виміряних напрямків на поверхню референцеліпсоїда.
В кожний напрямок, проведений до центрів знаків повинні бути введені такі поправки:
1.поправка за ухил прямовисної лінії:
10 ( i sin A12 i cosA12)ctgZ12;(16.1)
2.поправка за висоту візирної цілі при редукуванні на поверхню референц-
еліпсоїда:
2 H2[1]2 l2 sin2Am cos2 B2; 16.3 2
3. поправка за перехід від прямого нормального перетину до геодезичної лінії:
|
|
|
l2 |
|
S2 |
[2]2 |
sin2A |
cos2 B |
|
|
|
|
|||||||
|
3 |
12 '' |
12 |
m |
m |
|
m |
||
Індекс 1 означає точку стояння приладу, 2 – спостерігає мий пункт.
1
Am 2 A12 A21 180 ;
Bm B1 B2
2
У формулі (16.1) астрономічні зенітні віддалі:
ctgZ |
|
|
H2 H1 |
|
S12 |
|
V2 l1 |
; 16.4 |
|
|
|
|
|||||
12 |
|
S12 |
|
2R |
|
S12 |
||
|
|
|
|
|
||||
де Н1 і Н2 |
- висоти пунктів над рівнем моря; |
|||||||
114
S12 - віддаль між пунктами по еліпсоїду; l1 – висота приладу над центром знаку;
V2 – висота візирної цілі над центром знаку; Z12 – астрономічна зенітна віддаль.
Формули справедливі, якщо врахувати рефракцію із спостережень. Якщо під Н1 і Н2 розуміти висоти над еліпсоїдом, тоді слід брати любу ctg
Z12 – геодезичну зенітну віддаль. Практично у формулі (16.1) можна брати любу зенітну віддаль. У формулі (16.2) Н2 - висота візирної цілі над референцеліпсоїдом. Для обчислення поправок необхідні величини В, А, S, їх слід знати приблизно. В і А до 1 , S – до 4 значних цифр.
Наближено в полі вирішують трикутники. Потім з точністю до 1 обчислюють геодезичні координати і азимути. Для обчислення першої поправки необхідно на пункті знати складові відхилення виска. Вони можуть бути одержані, якщо на пункті виконане визначення широти і довготи.
= φ – В;
= (λ – L) cos φ.
Для використання формули (16.2) необхідно знати висоту тріангуляційного пункту над референц-еліпсоїдом. Кожна поправка визначається з точністю 0,001 . По своїй величині ці поправки передають в сотих частках секунд дуги і рідко з точністю 0,1. Сумарна поправка уводиться в виміряні напрямки:
115