Материал: Механика (статика). учебное пособие. Рябцев В.А
Две системы сил называют эквивалентными, если они, будучи приложенными поочередно, порознь, к одному и тому же абсолютно твердому телу вызовут одинаковое действие на тело. Эквивалентность систем сил обозначается символом . Замена исходной системы сил другой эквивалентной системой позволяет иногда существенно упростить исследование равновесия или движения тела. Более подробные сведения о преобразованиях эквивалентных систем сил приведены в гл. 9.
Теорема 8.1 о приведении произвольной системы сил к двум силам. Система сил, произвольно расположенных в пространстве, эквивалентна двум силам, одна из которых приложена в произвольной точке. Главный вектор и главный момент этой системы сил относительно этой точки соответственно равны главному вектору и главному моменту эквивалентной системы двух сил относительно той же точки.
Доказательство. Разделим доказательство теоремы на два этапа. Вначале заменим данную систему сил тремя эквивалентными силами, а затем покажем, что три силы всегда можно заменить двумя силами.
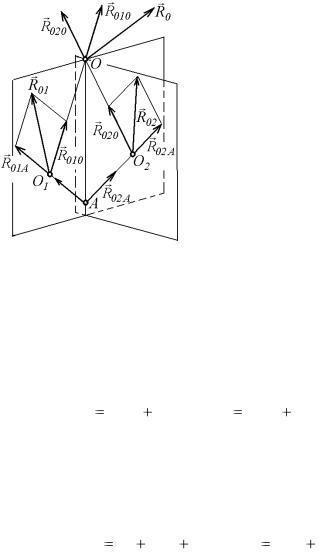
Возьмем три произвольные точки О, O1, O2..
|
|
|
Соединим эти точки прямы- |
|
|
|
|
ми с точками приложения Ak |
|
|
|
|
всех сил системы (рис. 8.1), |
|
|
|
|
где k - порядковый номер |
|
|
|
|
|
|
|
|
|
точки приложения силы Pk . |
|
|
|
|
|
|
|
|
|
Тогда каждую силу Pk , со- |
|
|
|
|
гласно правилу параллеле- |
|
Рис. 8.1 |
|
пипеда, можно разложить по |
||
|
трем направлениям OAk , |
|||
|
|
|
||
|
||||
O1Ak и O2Ak Pk |
Pko |
Pko1 |
Pk02 . |
|
Согласно теореме Вариньона (§ 7.6)
136
|
|
|
|
|
|
|
|
|
M0 |
( Pk ) M0 |
( Pko ) M0 ( Pko1 ) M0 |
( Pko2 ) . |
|||||
|
|
|
|
|
|
|
|
|
Перенесем все составляющие силы Pko , Pko1 |
и Pk o2 по их |
|||||||
линиям действия соответственно в точки О, O1 и O2 . Получаем |
||||||||
|
|
|
|
|
|
|
|
|
три пучка сил: один пучок из сил |
Pk o , приложенных в точке О, |
|||||||
|
|
|
|
|
|
|
|
|
второй пучок из сил Pk o1 |
приложенных в точке O1 |
и третий |
||||||
|
|
|
|
|
|
|
|
|
пучок из сил Pk o2 |
приложенных в точке O2. Равнодействую- |
|||||||
щие сил, образующих каждый пучок сил, соответственно будут равны
|
|
|
|
|
|
|
|
|
|
|
|
|
R0 |
Pko ; |
R01 |
|
Pko1 ; R02 |
|
Pko 2 . |
|
|||
|
Согласно теореме Вариньона (§ 7.6), |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M0 ( R0 ) |
|
M0 ( Pko ) ; |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
M0 ( R01 ) |
M0 ( Pko1 ); |
|
M0 ( R02 ) |
M0 ( Pko2 ) . |
||||||
|
Итак, заданная система сил приведена к эквивалентной |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
системе из трех сил R0 |
, R01, R02 |
. Главные вектор и момент по- |
|||||||||
лученной системы сил равны |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
V0 |
Pk |
( Pk0 |
Pko1 |
|
Pko 2 ) |
|
|
Pk0 |
Pk01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pk 02 |
R0 |
|
R01 |
R02 , |
|
|
(а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
M0 |
M0 ( Pk ) |
[ M0 ( Pko ) |
M0 ( Pko1 ) M0 ( Pko 2 )] |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
M0 ( Pko ) |
|
M0 ( Pko1 ) |
M0 ( Pko2 ) |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M 0 ( R0 ) M 0 ( R01 ) M 0 ( R02 ) . |
(б) |
||||||||
Итак, главный вектор заданной системы сил равен главному вектору эквивалентной системы из трех сил, приложенных в точках О, O1 и O2, а главный момент заданной системы
137
сил относительно точки О равен главному моменту относительно той же точки эквивалентной системы из трех сил.
Покажем, что систему трех сил можно заменить двумя сила-
|
|
|
|
ми. Имеем три силы: R0 , R01 , R02 |
, |
||
приложенные соответственно в точках О, O1 и O2. Проведем через точку О две плоскости так, чтобы
одна плоскость проходила через
линию действия силы R01 , а дру-
гая - через R02 . Такое построение
|
Рис. 8.2 |
|
всегда возможно (рис. 8.2). На ли- |
||||
|
|
|
|
нии пересечения плоскостей возь- |
|||
мем любую точку А и соединим ее прямыми с точками O1 и O2. |
|||||||
|
|
|
|
|
|
|
|
Затем разложим силу |
R01 по направлениям O1O и O1А, а силу |
||||||
|
|
|
|
|
|
|
|
R02 разложим по направлениям O2O и О2А. |
|
||||||
|
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R01 |
R01O |
R01A , |
R02 |
R02O |
R02A . |
(в) |
|
|
|
|
|
|
|
|
|
Перенесем по линиям действия составляющие |
R01O и |
|||||
|
|
|
|
|
|
|
|
R02O |
в точку приложения О, а составляющие R01A и R02A в |
||||||
точку приложения А. Затем складывая силы, приложенные в точках О и А, получаем
|
* |
|
|
|
|
|
|
. |
(г) |
R |
R R |
R , R |
R |
R |
|||||
0 |
|
0 |
010 |
020 |
|
A 01A |
02A |
|
|
Итак, исходная система сил приведена сначала к эквивалентной системе из трех сил, а затем к эквивалентной системе
из двух сил: |
|
* |
|
|
(рис. 8.3). Учитывая (а), (в) и (г), полу- |
R |
|
и R |
A |
||
|
0 |
|
|
|
|
чаем |
|
|
|
|
|
|
|
|
|
|
138 |
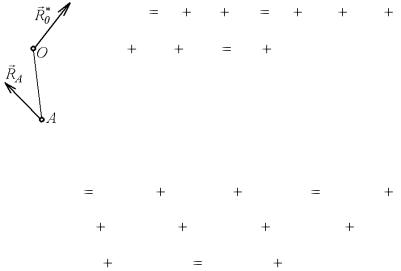
Рис. 8.3
M 0
|
|
|
|
|
|
|
VO |
R0 |
R01 |
R02 |
R0 |
R010 |
R01A |
|
|
|
* |
|
|
. |
R |
R |
R |
|
R |
A |
|
02O |
02A |
0 |
|
|
||
Следовательно, главный вектор данной системы равен главному вектору эквивалентной системы из двух сил, из которых одна приложена в произвольной точке О.
Далее, с учетом (б), (в) и (г), получаем
|
|
|
|
|
|
|
|
M 0 ( RO ) M 0 ( RO1 ) M 0 ( RO2 ) M 0 ( RO )
|
|
|
|
|
|
M0 ( RO10 ) |
M0 ( RO20 ) |
M0 ( RO1A ) |
|||
|
|
|
|
* |
|
|
|
). |
M |
( R |
) M |
( R |
|
) M |
( R |
A |
|
0 |
O2 A |
0 |
O |
0 |
|
|
||
Следовательно, главный момент заданной системы сил относительно произвольно выбранной точки О равен главному моменту относительно той же точки эквивалентной системы из двух сил. Теорема доказана.
§ 8.2. Условия равновесия абсолютно твердого тела
При доказательстве теорем обычно употребляют формулировку: «необходимое и достаточное условие». Теоремой, обратной данной (прямой теореме), называют такую теорему, условием которой служит заключение данной теоремы, а заключение - условием данной теоремы. Если прямая теорема верна, то обратная теорема может быть как верна, так и не верна. Поэтому истинность обратных теорем подлежит доказательству.
Прямой назовем теорему, содержащую так называемое необходимое условие. Введем для сокращения записи буквенные обозначения. Пусть выполнение некоторого события (явления, свойства и т.д.) обозначим буквой А. Тогда необходимым условием для события А является такое событие В, кото-
139
рое всегда вытекает, следует из события А. Запишем условно А В. Например, пусть событием А является дождь. Тогда не-
обходимым условием В для события А (дождя) является облачное небо, так как, если идет дождь, то небо облачное. Но для обратной теоремы это утверждение неверно, так как если на небе облака, то это недостаточное условие для дождя: дождя может и не быть. В нашем примере из А следует В, но из В может и не следовать А.
Таким образом, из необходимого условия В еще не следует существование условия А. Достаточным условием для события А является такое событие В, из которого всегда следует событие А. Условная запись: А В.
Например, пусть событием А является то, что на улице светло. Тогда солнечный день является достаточным условием
Вдля события А. Но это условие не является необходимым, так как оно может не выполняться, например - солнце не светит, а на улице все же светло из-за электрического освещения.
Внашем примере из события В следует событие А, но если событие В не выполняется, то событие А может все же выполняться.
Приведем другой пример: для четности числа достаточно, чтобы оно делилось без остатка на четыре. Здесь событием А является четность числа. Достаточным условием для А является событие В, т. е. делимость числа на четыре. Действительно, если число делится на четыре, то это достаточно, чтобы оно было четным. Но делимости на четыре может и не быть, т. е. достаточное условие может не выполняться, например, число шесть не делится на четыре, а все же является четным. В этом примере достаточное условие слишком - «мощное», излишнее.
Большое значение в разнообразных исследованиях в математике, теоретической механике и многих других дисциплинах играют теоремы, которые сами верны и обратные к кото-
140